CONTREX MLP-Trim User Manual
Page 84
3 - 44
Inverse Master Mode Example
The Inverse Master Mode Example demonstrates how scaling and setpoint Control
Parameters are entered for a typical Inverse Master mode of operation:
It takes 10 seconds to move a product through a heat treat oven when
the conveyor motor is running at 1500 RPM. The conveyor motor shaft
is equipped with a 60 tooth ring kit. Set Master Setpoint 1 (CP-01) so
that the product is in the oven for 20 seconds. Set Master Setpoint 2
(CP-02) so that the product is in the oven for 15 seconds.
Table 3-33 shows the scaling Control Parameters that would be entered in the
MLP–Trim for this example.
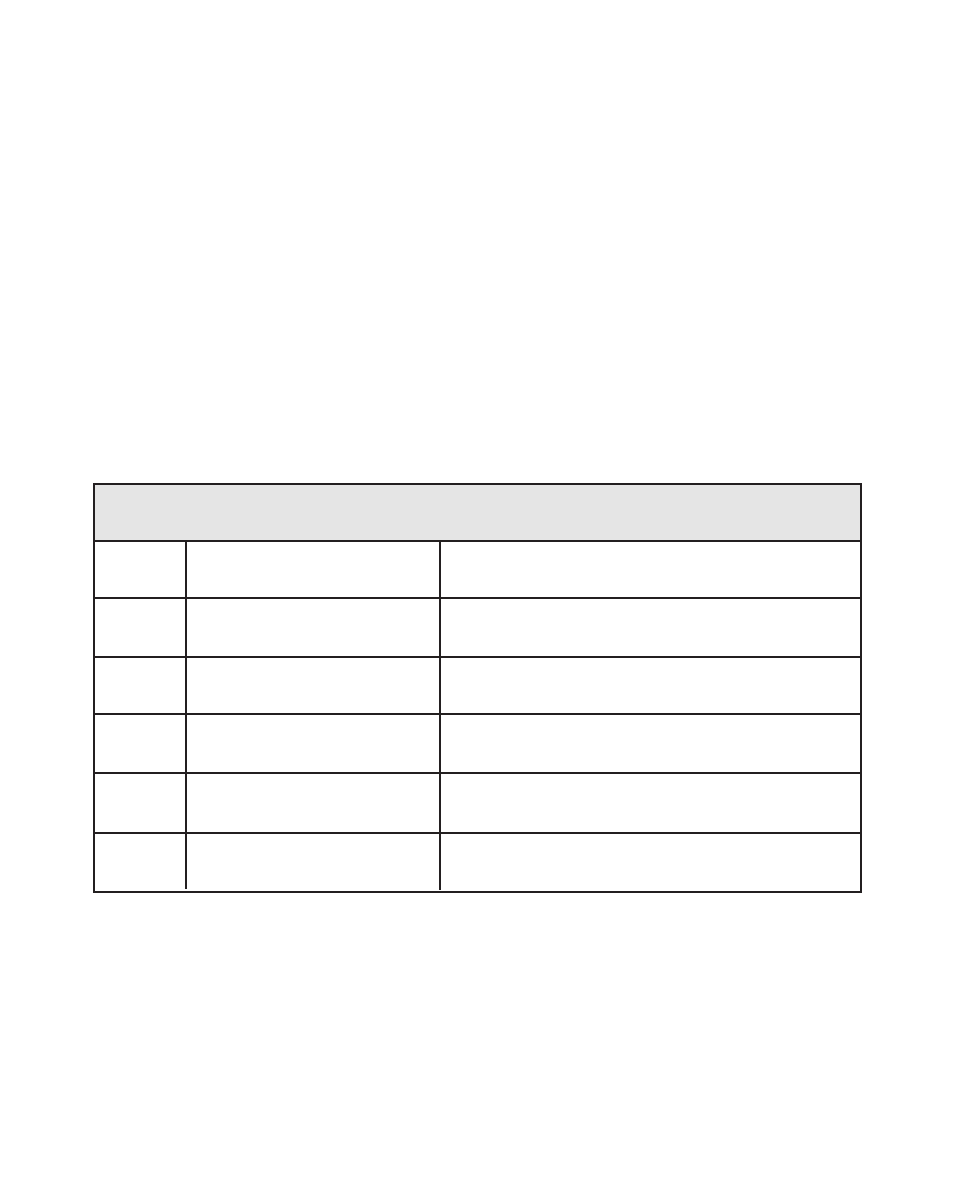
Table 3-33 Inverse Master Mode Control Parameters Example
CP
Parameter Name
Parameter Value
CP-62
Inverse Scaling
2
CP-31
PPR Feedback
60
CP-34
Max RPM Feedback
1500
CP-20
Master E.U.
10.0
CP-01
Master Setpoint 1
20.0
CP-02
Master Setpoint 2
15.0
After the Scaling and the Master Setpoints for your system have been entered, you can
enter the Acceleration/Deceleration Control Parameters for the Inverse Master mode.
Acceleration/Deceleration is discussed in
Operation: Control Parameters, Acceleration/
Deceleration
.
The following section demonstrates how to enter Control Parameters for the Inverse
Follower mode of operation.