Garmin GPSMAP 2006C User Manual
Page 97
88
Understanding Sonar
Appendix H
Understanding Sonar
If you are unfamiliar with basic sonar, or need help determining what is displayed on the graph, this
section may be for you. This section is intended to help the novice user gain some understanding of how
the GPSMAP 2006/2010 operates when combined with a GSD 20 Sonar Module and how it can help
improve their fishing productivity.
To understand what the unit is displaying, it is important to have a general knowledge of how the
unit works and how it determines what to display. Briefly described, the unit operates by transmitting
sound waves toward the bottom of a lake, stream, or seabed in a cone-shaped pattern. When a transmit-
ted soundwave strikes an underwater object such as the bottom, a piece of structure, or a fish, sound is
reflected back to the transducer. The transducer collects the reflected sound waves and sends the data to
the unit to be processed and displayed on the graph. The underwater data is displayed on the graph in the
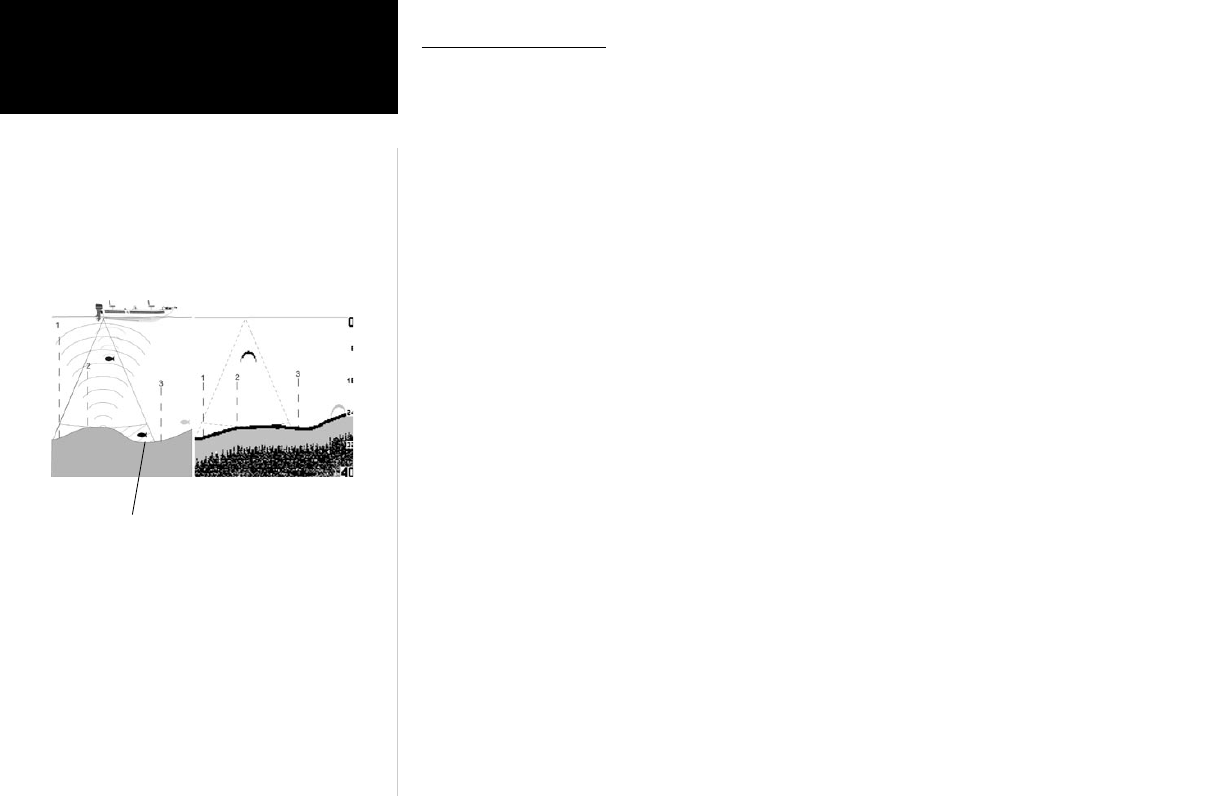
order that it is returned: first returned—first on the graph. The diagram to the left demonstrates this by
showing an underwater scene as it would be displayed on the graph. Generally speaking, if the only thing
between the transducer and the bottom is water, the first strong return will come from the bottom directly
below the transducer. The first strong return sets the bottom level. Weaker secondary returns provide the
detailed data. Sonar returns display as reds (strongest), then oranges (strong), yellows (medium), greens
(weaker), and blues (weakest) on color models and dark (strongest) to lighter (weaker) shades of gray on
monochrome units.
That is a brief description of how your GPSMAP 2006/2010 operates when combined with a GSD 20
Sonar Module. The following pages will show how this data can help you to improve your fishing.
This fish is currently in a dead zone and is not
detected by the sonar. The fish is in the coverage
area of the transducer, but remember– the first
strong return sets the bottom level. The fish will
eventually be detected when the first strong return
sets the bottom level below the fish.