3 configuration – Navman 11 User Manual
Page 59
59
MN002000A © 2004 Navman NZ Ltd. All rights reserved. Proprietary information and specifications subject to change without notice.
4.3 Configuration
4.3.1 Definition
Configuration is defined as the set of data or
actions that provide information that is fairly
constant and usually connected with installation,
environmental, or user preferences. Common
examples are map datums or satellite elevation
mask angle. Configuration data customises or
optimises the GPS receiver for use in a particular
situation. In general, this data is held constant until
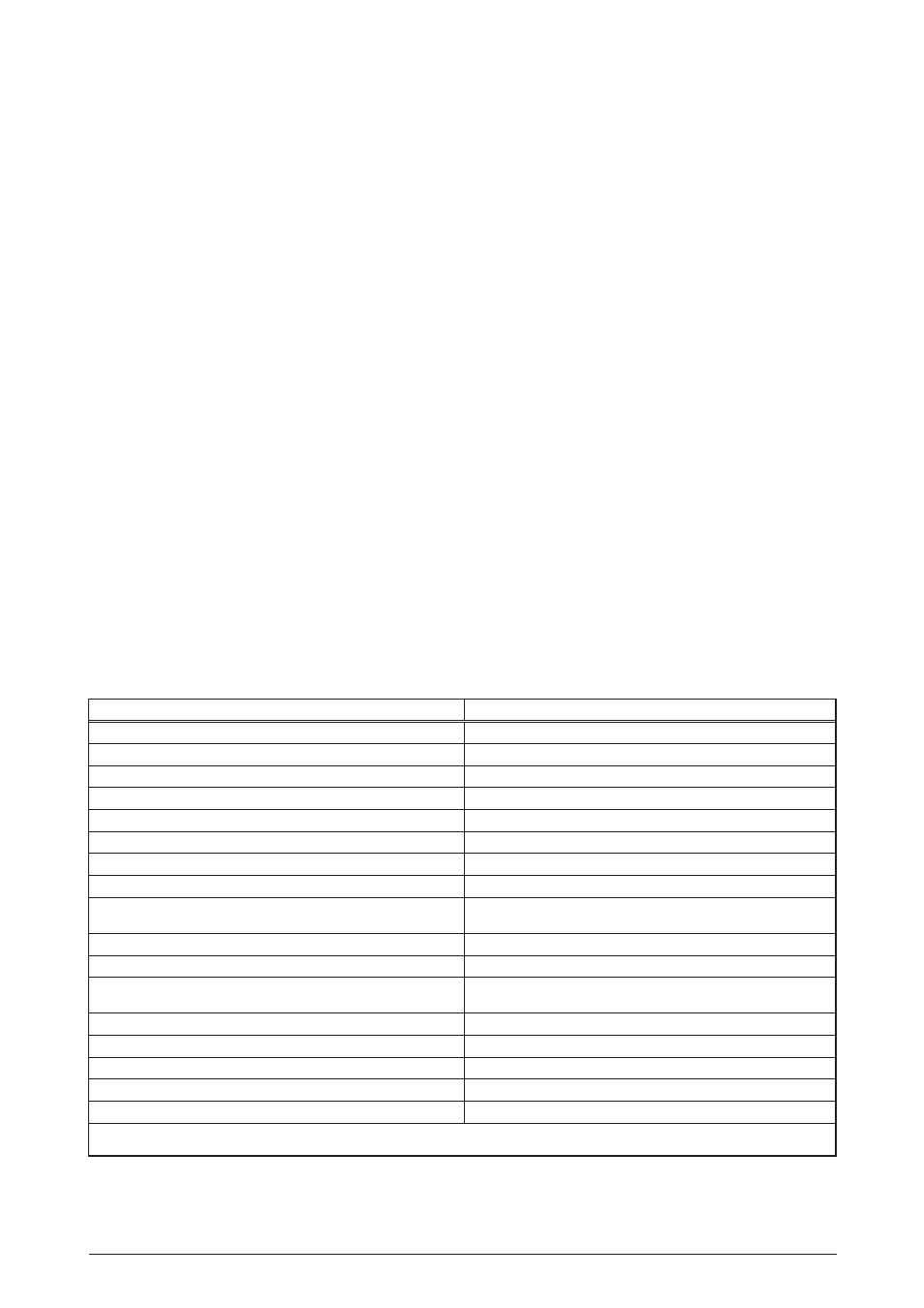
the user decides to change it. Table 4-1 provides
a brief description of all default configuration
parameters.
Configuration data controls how the receiver works
on a daily basis. Typically, this information is stored
in EEPROM, accessed at the time of initialisation,
and updated whenever the user dictates a change.
The obvious benefit of this feature is that the board
can be configured to work in a customised way.
The various types of configuration data are briefly
described in the following paragraphs.
4.3.2 Geodetic datums
Jupiter GPS receivers provide two configuration
features related to datums: datum selection and
datum definition. Datum selection controls the
transformation used for all navigation outputs and
inputs. Over 180 pre-defined datums are
available for user configuration.
Datum definition allows the user to specify a
custom datum that can be used in the same way
as an element of the pre-defined set. A maximum
of five user-defined datums is supported. Refer to
section 4.6 (Navigation) for more details.
4.3.3 Satellite selection
Jupiter GPS receivers provide two configuration
features related to satellite selection: elevation
mask angle and candidate satellite specification.
Satellite elevation mask angle defines the elevation
angle that is used to screen satellites for inclusion
in the navigation solution and Dilution of Precision
(DOP) calculations. Satellites that fall between the
elevation mask angle and the horizon (0 degree
mask) are tracked, when possible, to gather
their ephemeris data so they are ready to be
used when they rise above the elevation mask.
Satellite candidate specification is used to explicitly
control inclusion in the visible list (satellites above
horizon). By default, a satellite is a candidate until
it is excluded, at which point it must be re-selected
to be a candidate again. (See sections 4.6 and 4.7
for more details.)
Parameter
Value/Description
datum
WGS-84
mask angle
10 degrees
cold start control
enabled
timeout
300 ns
platform class
automotive
altitude measurement validity
mark altitude solutions valid
maximum EHPE
100 m (*)
maximum expected EVPE
150 m (*)
criterion for minimum number of satellites used for a
solution
zero (*) (**)
DGPS validity
not required for a valid solution (*)
held altitude
enabled
position pinning enabled
enabled (automatically disabled when DGPS corrections
are available)
ground track smoothing
enabled (only when DGPS is not available)
DGPS disable
‘false’ (i.e. DGPS is active if corrections are available)
host port communication parameters (Navman binary)
9600, N, 8, 1
host port communication parameters (NMEA)
4800, N, 8, 1
host port communication parameters (RTCM inout only)
9600, N, 8, 1
(*) solution validity criteria
(**) after a ‘fully determined’ or successful transition to navigation
Table 4-1 Default configuration data