Navman 11 User Manual
Page 52
52
MN002000A © 2004 Navman NZ Ltd. All rights reserved. Proprietary information and specifications subject to change without notice.
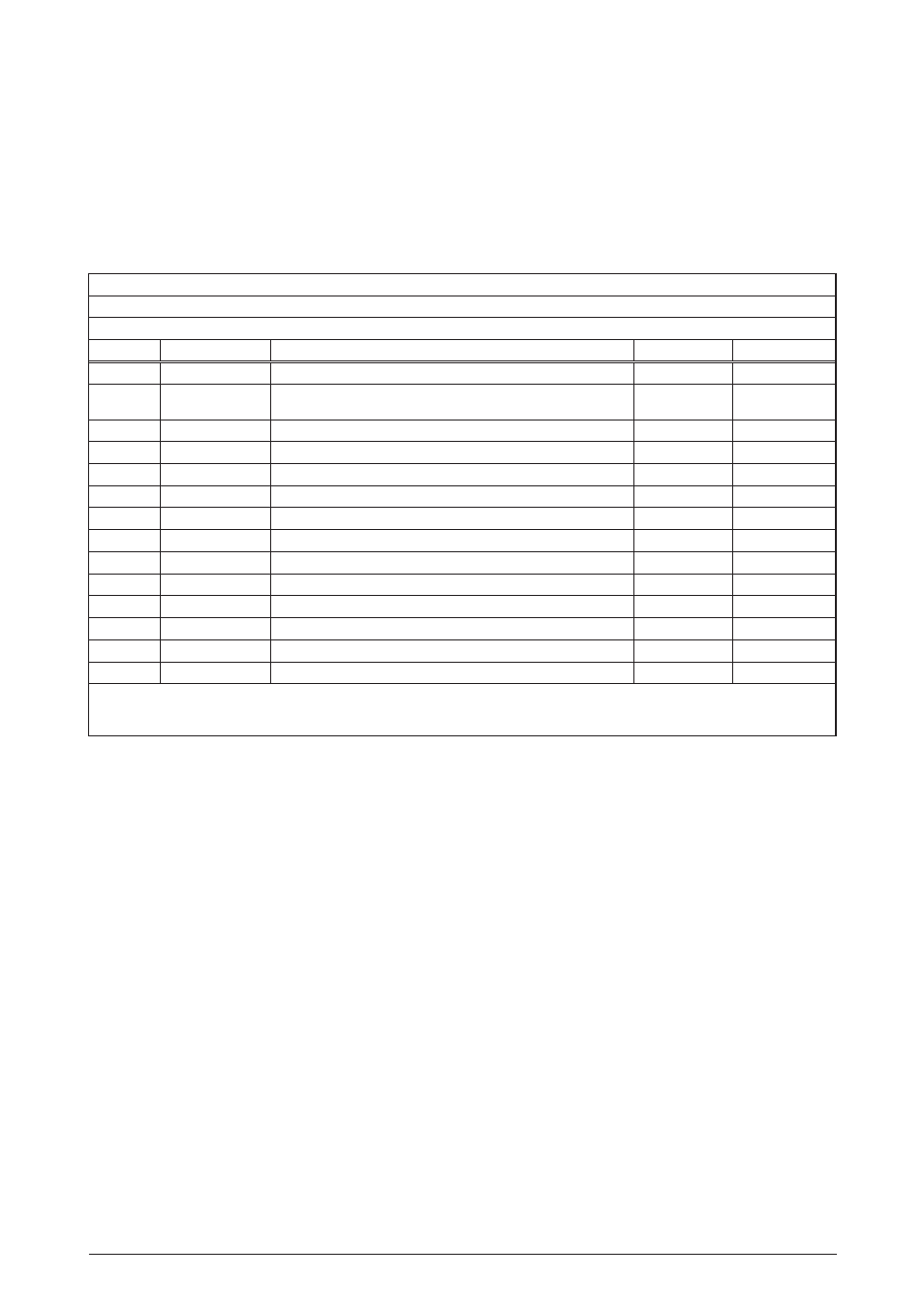
Message ID: RMC
Rate: variable; defaults to 1 Hz
Fields: 11
Field No.
Symbol
Field description
Field type
Example
$__RMC
Start of sentence and address field
$GPRMC
1
POS_UTC
UTC of position (hours, minutes, seconds, decimal
seconds)
hhmmss.ss
185203
2
PAS_STAT
Position status (A = Data valid, V = Data invalid) (Note 1)
a
A
3
LAT
Latitude
1111.11
3339.7332
4
LAT_REF
Latitude direction (N = north, S = south)
a
N
5
LON
Longitude
yyyyy. yy
11751.7598
6
LON_REF
Longitude direction (E = east, W = west)
a
W
7
SPD
Speed over ground (knots)
x.x
0.000
8
HDG
Heading/track made good (degrees true)
x.x
121.7
9
DATE
Date (dd/mm/yy)
xxxxxx
160496
10
MAG_VAR
Magnetic variation (degrees)
x.x
13.8
11
MAG_REF
Magnetic variation (E = east, W = west) (Note 2)
a
E
CKSUM
Checksum
*hh
*55
Sentence terminator
Note 1: The position status flag will be set to ‘V’ (data invalid) until the receiver is navigating. At that time, the flag is
changed to ‘A’ (data valid) and the information provided in the RMC message will reflect a navigation solution.
Note 2: Easterly variation (E) subtracts from true course. Westerly variation (W) adds to true course.
Table 3-51. RMC message (recommended minimum specific GPS data)
3.6.1.7 Recommended minimum specific GPS data
(RMC)
This message contains time, date, position,
course, and speed data. The fields in this message
always contain data even when the receiver is not
navigating. This allows user-initialised, stored, or
default values to be displayed before a solution is
obtained. The contents of the ‘RMC’ message are
described in Table 3-51.
Sample message:
$GPRMC,185203,A,3339.7332,N,11751.7598,
W,0.000,121.7,160496,13.8,E*55