Navman 11 User Manual
Page 38
38
MN002000A © 2004 Navman NZ Ltd. All rights reserved. Proprietary information and specifications subject to change without notice.
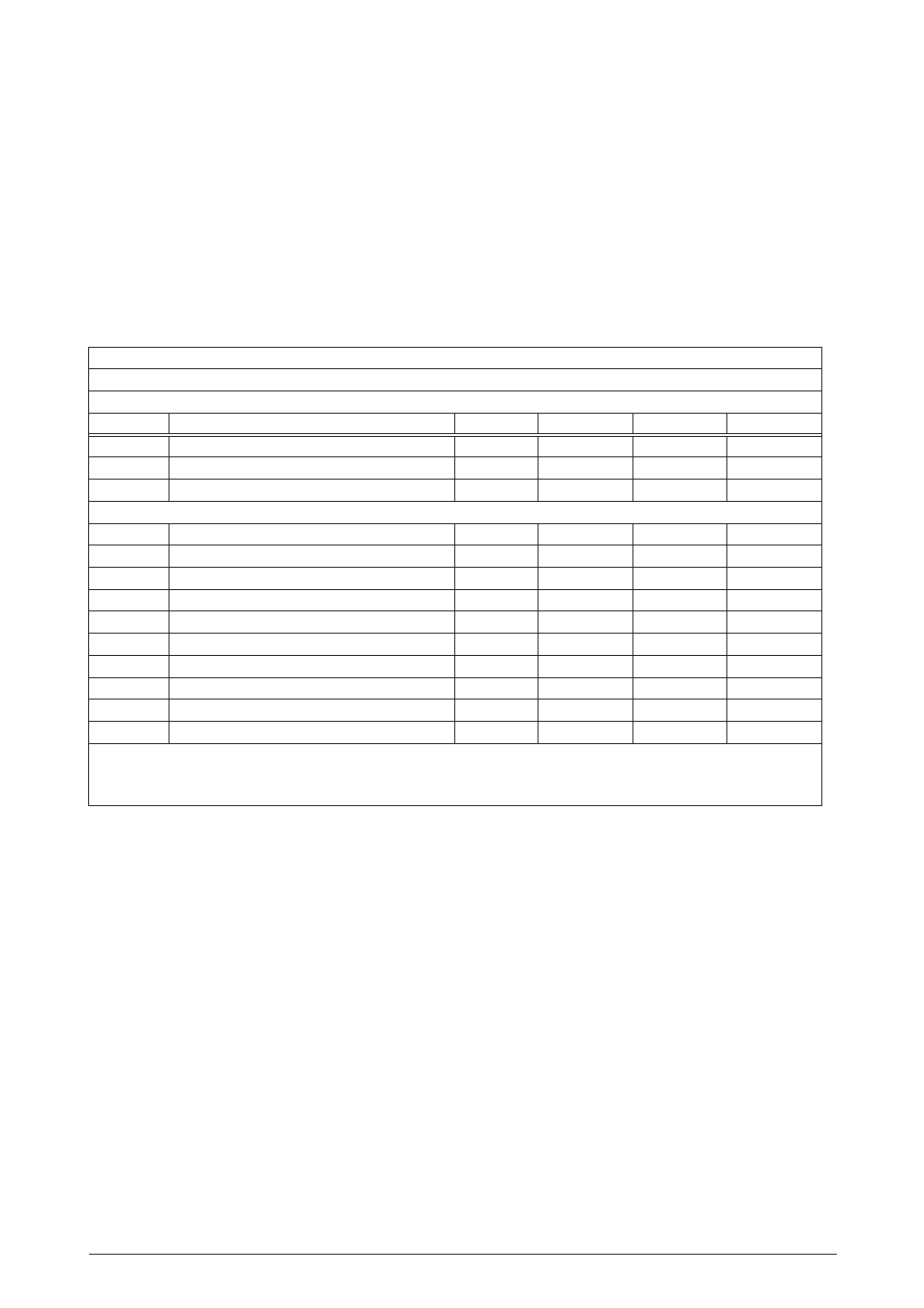
Message ID: 1219
Rate: as required (maximum rate is 1 Hz)
Message length: 12 words
Word No.
Name
Type
Units
Range
Resolution
1-4
Message header
5
Header checksum
6
Sequence Number (Note 1)
I
0 to 32 767
Altitude input control (7.0-7.15)
7.0
Force use
Bit
1 = force
7.1
MSL select
Bit
1 = MSL
7.2
Store (RAM) (Note 2)
Bit
1 = store
7.3
Store (EEPROM) (Note 2)
Bit
1 = store
7.4
Clear (RAM)
Bit
1 = clear
7.5
Clear (EEPROM)
Bit
1 = clear
7.6-7.15
Reserved
8-9
Altitude
DI
m
±0 to 50 000
10
-2
10
Altitude standard deviation
UDI
m
0 to 10 000
10
-2
11
Data checksum
Note 1: The sequence number is a count that indicates whether the data in a particular binary message has been updated or
changed since the last message input.
Note 2: For an altitude sensor that is supplying data in real-time, the OEM must ensure that bits 7.2 and 7.3 are set to zero so the
attitude value will not be stored continuously in memory (RAM or EEPROM).
Table 3-31 Message 1219 (user-entered altitude input)
3.5.2.9 Message 1219 (user-entered altitude input).
This message allows the user to enter an altitude
to be used for altitude hold during 2D navigation.
If the ‘force use’ field is not set, the receiver may
ignore the altitude input if it thinks it has a better
estimate.
Setting the ‘clear’ field will clear out the last
estimate of altitude which the receiver uses for
altitude hold. Setting the ‘MSL select’ field allows
entry of mean-sea- level altitude. A standard
deviation can be specified to indicate the
uncertainty associated with the entered altitude.
The receiver will weight the altitude measurement
according to this uncertainty. As a special case, a
zero standard deviation indicates that the quality of
the altitude is not known. The contents of the ‘user-
entered altitude input’ message are described in
Table 3-31.