Navman 11 User Manual
Page 33
33
MN002000A © 2004 Navman NZ Ltd. All rights reserved. Proprietary information and specifications subject to change without notice.
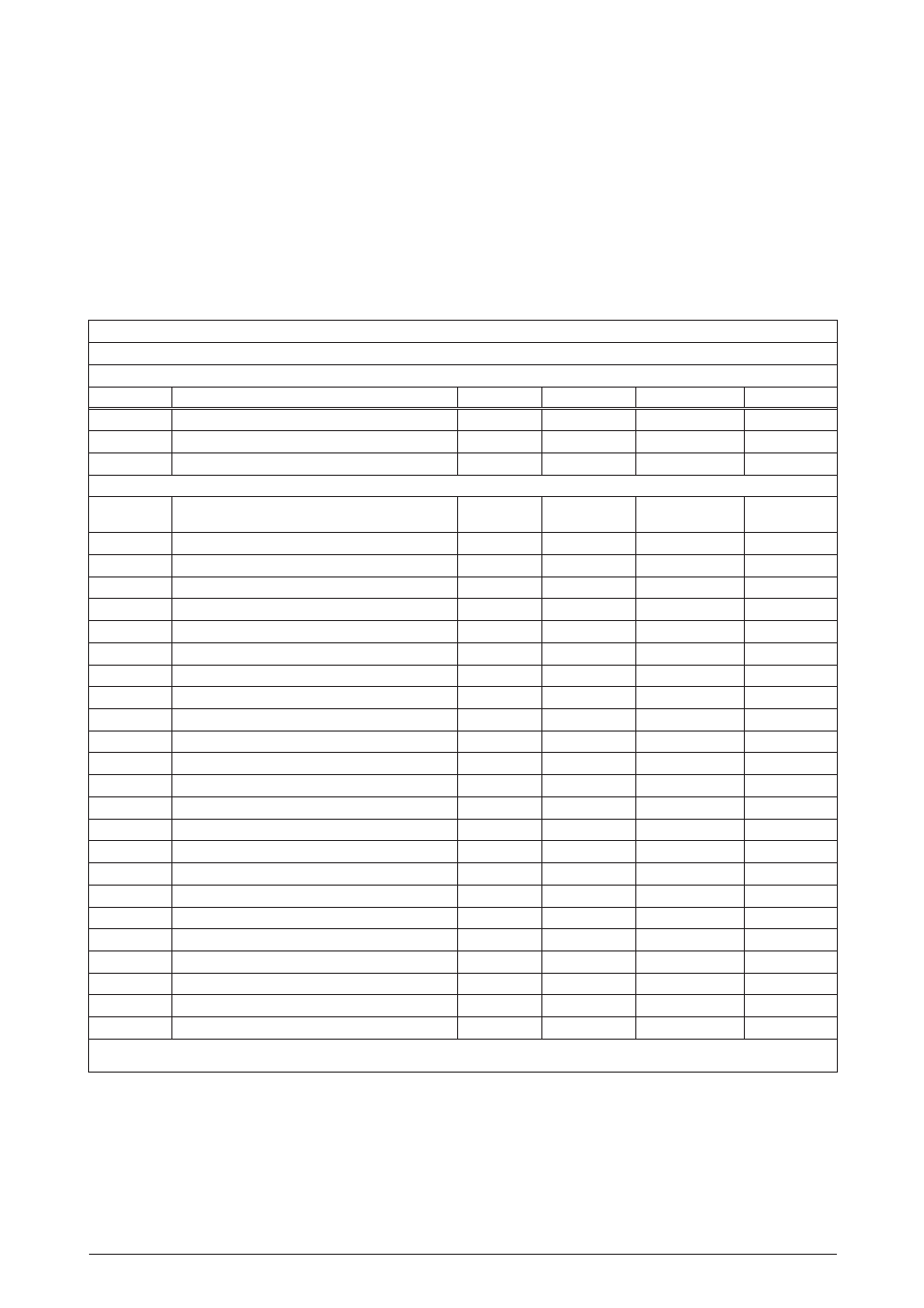
Message ID: 1200
Rate: as required - maximum rate is 1 Hz
Message length: 27 words
Word No.
Name
Type
Units
Range
Resolution
1-4
Message header
5
Header checksum
6
Sequence number (Note 1)
I
0 to 32767
Initialisation Control (7.0-7.15)
7.0
Force time
Bit
0 = normal
1 = forced
7.1
GPS time valid
Bit
1 = valid
7.2
UTC time valid
Bit
1 = valid
7.3
Lat/lon valid
Bit
1 = valid
7.4
Altitude Valid
Bit
1 = valid
7.5
Speed/course valid
Bit
1 = valid
7.6
Magnetic course
Bit
1 = magnetic
7.7
Climb rate valid
Bit
1 = valid
7.8-7.15
Reserved
8
GPS week number
UI
weeks
0 to 32 767
9-10
GPS seconds into week
UDI
s
0 to 604 799
11
UTC day
UI
days
1 to 31
12
UTC month
UI
months
1 to 12
13
UTC year
UI
years
1980 to 2079
14
UTC hours
UI
h
0 to 23
15
UTC minutes
UI
min
0 to 59
16
UTC seconds
UI
s
0 to 59
17–18
Latitude
DI
rad
±0 to �/2
10
-9
19–20
Longitude
DI
rad
±0 to �
10
-9
21–22
Altitude
DI
m
±0 to 50 000
10
-2
23–24
Ground speed
UI
m/s
0 to 1000
10
-2
25
Course
UI
rad
0 to 2�
10
-3
26
Climb rate
i
m/s
±300
10
-2
27
Data checksum
Note 1: The sequence number is a count that indicates whether the data in a particular binary message has been updated or
changed since the last message input.
Table 3-23 Message 1200 (geodetic position and velocity initialisation)
3.5.2 Binary input message descriptions.
This section provides details for each of the input
binary messages.
3.5.2.1 Message 1200 (geodetic position and
velocity initialisation)
This message allows the user to initialise the
receiver with the specified geodetic position,
ground speed, course over ground, and climb
rate. The course may be either true or magnetic,
as indicated by the magnetic course field. The
GPS/UTC time represents the time at which the
solution was computed and, if present, will be
used to propagate the solution to the current time.
The contents of the ‘geodetic position and velocity
initialisation’ message are described in Table 3-23.