Simrad AUTOPILOT SYSTEM AP50 User Manual
Page 129
Software Set-up Procedure
20221032B
127
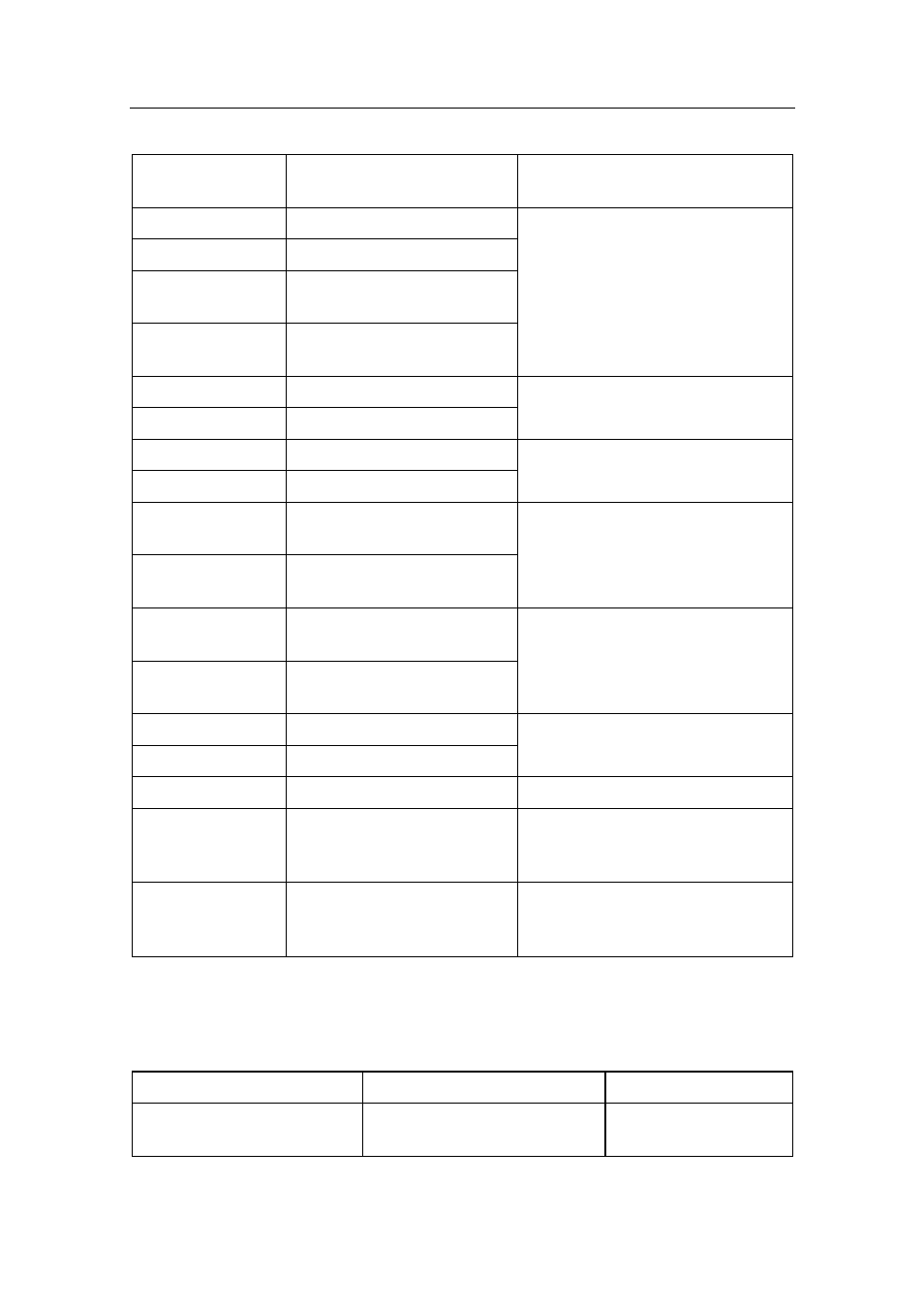
Abbreviated
name
Equipment / Usage
NOTES
GPS1
Primary GPS/Chart Plotter
GPS2
Backup GPS/Chart Plotter
ECS1 *
Primary Electronic Chart
System
ECS2 *
Backup Electronic Chart
System
Can be used as either Nav. source
or Speed source
GYRO1
Any primary gyro
GYRO2
Backup gyro for GYRO1
NMEA, syncho or step signal input
THD1
Transmitting Heading Device
THD2
Transmitting Heading Device
NMEA input
MAGN1
Magnetic compass with
course detector (CD100A)
MAGN2
Magnetic compass with
course detector (CD100A)
1) CD100A + CDI35 connected to
J50
2) CD100A directly connected to
CI300X
FLUX1
For use with fluxgate
compasses
FLUX2
For use with fluxgate
compasses
RobNet, NMEA, sine/cosine or J50
Heading Sensor (HS) input
WIND
For wind sensor
DEPTH
For depth sensor
NMEA input
LOG
For speed sensor
NMEA or pulse log
Output INSTR
NMEA output of compass
heading
or VDR data
HDG or HDT output increased
from 1 to 5 times/sec. on TX1 port.
HDT and RSA 5x/sec.
Output RADAR
Clock/data heading output to
radars
May select Simrad, Furuno, or
Special** (for both J50 and
NI300X)
* Automatic course change at waypoint will now occur during navigation in NAV
mode.
** For future use.
Table 5-1 Interface Menu
Output signal
Output terminal
Output sentence
Continuous output of 10 Hz
NMEA compass heading
Junction unit, Power PCB,
NMEA2, TX2+, TX2–
HDT or HDG
(input dependent)
Table 5-2 Permanent NMEA Output on Port 2