Operation – MITSUBISHI ELECTRIC MR-J2S- CL User Manual
Page 92
4 - 9
4. OPERATION
(2) Details of programming languages
(a) Details of the command (SPN STA STB STC STD)
"SPN" "STA" "STB" "STC" and "STD" commands will be validated, when the "MOV" and "MOVA"
commands are executing. The setting numbers will be validated, expect resetting the numbers.
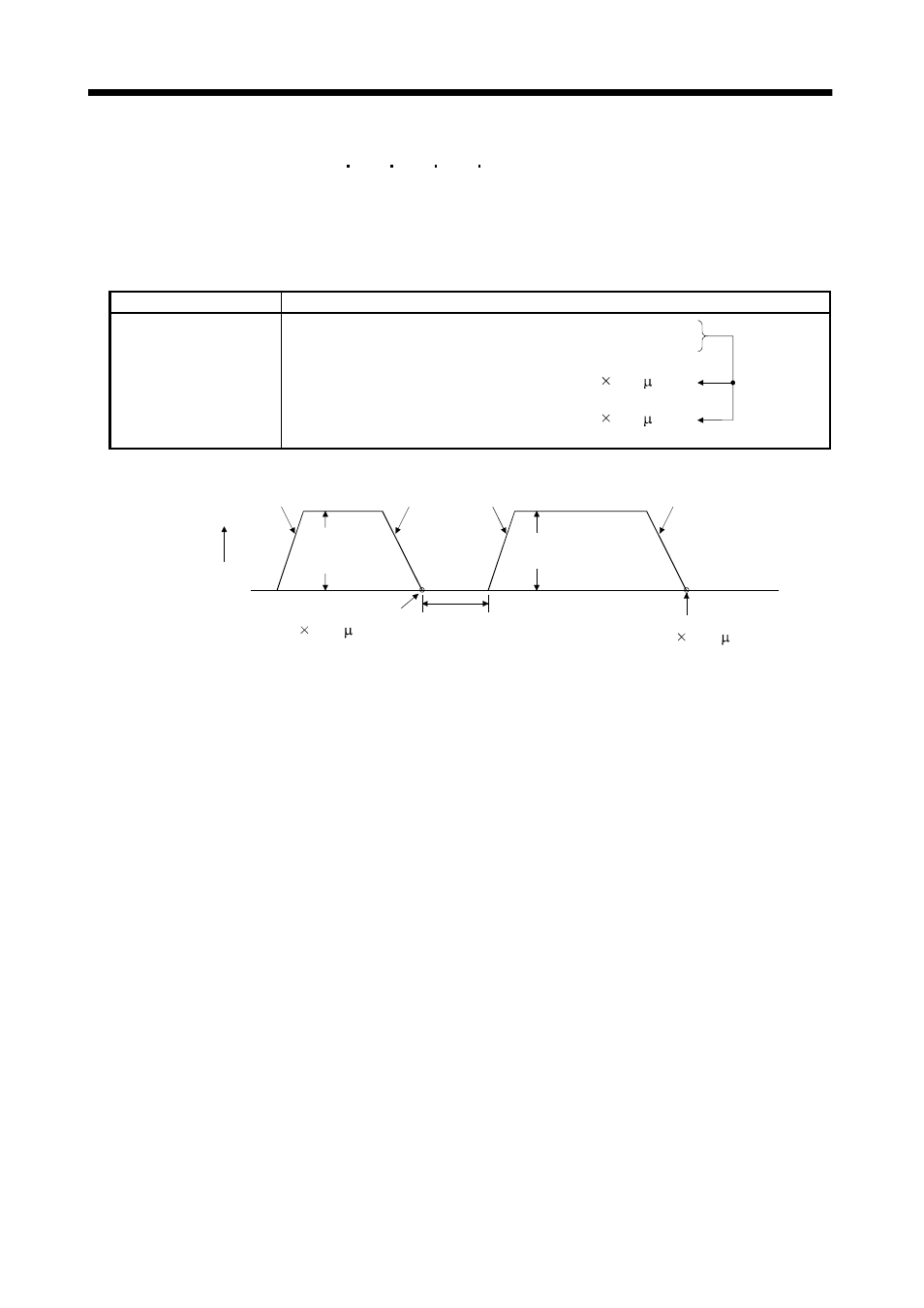
1) Program example 1
When operation is to be performed in two patterns that have the same servo motor speed,
acceleration time constant and deceleration time constant but different move commands.
Program
Description
SPN (1000)
STA (200)
STB (300)
MOV (1000)
TIM (10)
MOV (2000)
STOP
Speed (Motor speed)
1000 [r/min]
a)
Acceleration time constant
200 [ms]
b)
Deceleration time constant
300 [ms]
c)
Absolute move command
1000 [ 10
STM
m] d)
Dwell command time
100 [ms]
e)
Absolute move command
2000 [ 10
STM
m] f)
Program
end
0r/min
Servo motor
speed
Forward
rotation
a) Speed
(Motor speed)
(1000r/min)
d) Absolute move command
(1000 10
STM
m)
b) Acceleration time
constant (200ms)
c) Deceleration time
constant (300ms)
b) Acceleration time
constant (200ms)
c) Deceleration time
constant (300ms)
f) Absolute move command
(2000 10
STM
m)
e) Dwell command
time (100ms)
a) Speed (Motor speed)
(1000r/min)