Operation – MITSUBISHI ELECTRIC MR-J2S- CL User Manual
Page 103
4 - 20
4. OPERATION
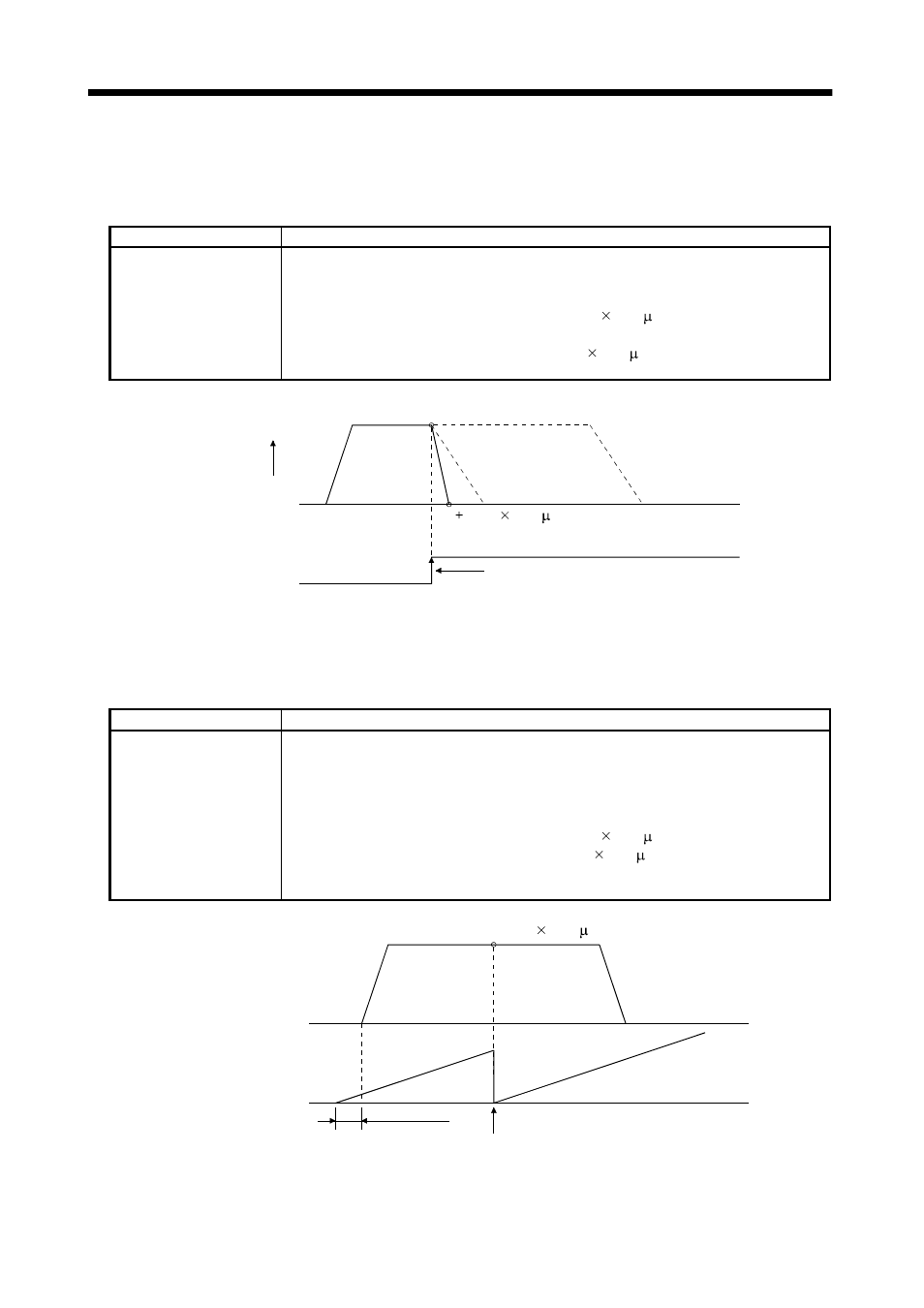
2) Program example 2
If the moving distance of the "ITP" command is less than the moving distance necessary for
deceleration, the actual deceleration time constant becomes less than the set value of the "STB"
command.
Program
Description
SPN (500)
STA (200)
STB (300)
MOV (1000)
SYNC (1)
ITP (50)
STOP
Speed (Motor speed)
500 [r/min]
Acceleration time constant
200 [ms]
Deceleration time constant
300 [ms]
Absolute move command
1000 [ 10
STM
m]
Step is suspended until Program input (PI1) turns ON.
a)
Interrupt positioning command
50 [ 10
STM
m]
b)
Program end
0r/min
ON
OFF
Servo motor
speed
Forward
rotation
Program input1
(PI1)
P1
P1 b)
Waiting for PI1 to be turned ON
by SYNC(1) (a))
(50 10
STM
m)
(f) External pulse counter (COUNT)
When the number of input pulses of the manual pulse generator becomes greater than the value
set with the "COUNT" command, the next step is started. Set "0" to erase the accumulated input
pulses.
Program
Description
COUNT (500)
SPN (500)
STA (200)
STB (300)
MOV (1000)
TRIP (500)
COUNT (0)
STOP
The next step is held until the number of input pulses of the manual pulse generator reaches
500 [pulses].
a)
Speed (Motor speed)
500 [r/min]
Acceleration time constant
200 [ms]
Deceleration time constant
300 [ms]
Absolute move command
1000 [ 10
STM
m]
Trip point
500 [ 10
STM
m]
b)
Waiting for PI1 to be turned ON by SYNC(1) (a))
c)
Program end
0r/min
³
“]
ƒ
T [ ƒ
{ ƒ
‚ [ ƒ
^
‰
ñ
“] ‘¬ “x
ON
OFF
b) 500 [ 10
STM
m]
Manual pulse
generator
a) 500 [pulse]
c) Accumulated input pulses are erased.