Operation – MITSUBISHI ELECTRIC MR-J2S- CL User Manual
Page 102
4 - 19
4. OPERATION
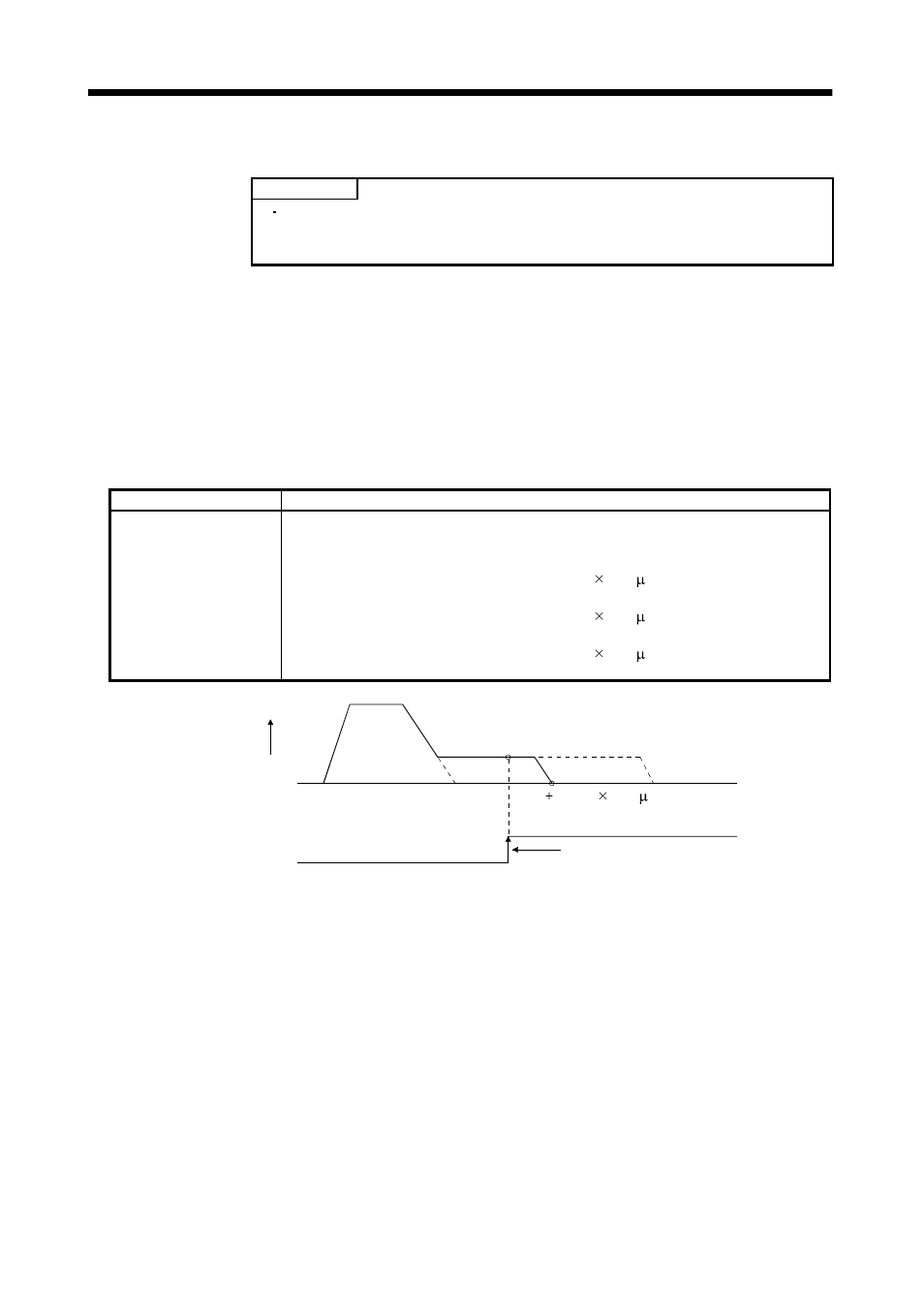
(e) Interrupt positioning command (ITP)
POINT
When Interrupt positioning (ITP) is used for positioning, a stop position
differs depending on the servo motor speed provided when the "ITP"
command is enabled.
When the "ITP" command is used in a program, the axis stops at the position by the set value
farther from the position where any of Program input 1 to 3 (PI1 to PI3) turned ON.
If the move command set with the "MOV", "MOVI", "MOVA" or "MOVIA" command is less than the
set value of the "ITP (set value)" command, the program proceeds to the next step without
executing the "ITP (set value)" command.
When using the "ITP" command, always place the "SYNC" command immediately before the "ITP"
command.
1) Program example 1
Program
Description
SPN (500)
STA (200)
STB (300)
MOV (600)
SPN (100)
MOVA (600)
SYNC (1)
ITP (200)
STOP
Speed (Motor speed)
500 [r/min]
Acceleration time constant
200 [ms]
Deceleration time constant
300 [ms]
Absolute move command
600 [ 10
STM
m]
Speed (Motor speed)
100 [r/min]
Absolute continuous move command
600 [ 10
STM
m]
Step is suspended until Program input (PI1) turns ON.
a)
Interrupt positioning command
200 [ 10
STM
m]
b)
Program end
P1
0r/min
ON
OFF
Servo motor
speed
Forward
rotation
Program input1
(PI1)
P1 b)
Waiting for PI1 to be turned ON
by SYNC(1) (a))
(200 10
STM
m)