Thrust, Brakes – Adept Python User Manual
Page 44
Chapter 3 - Python Linear Module Descriptions
44
Adept Python Modules User’s Guide, Rev. E
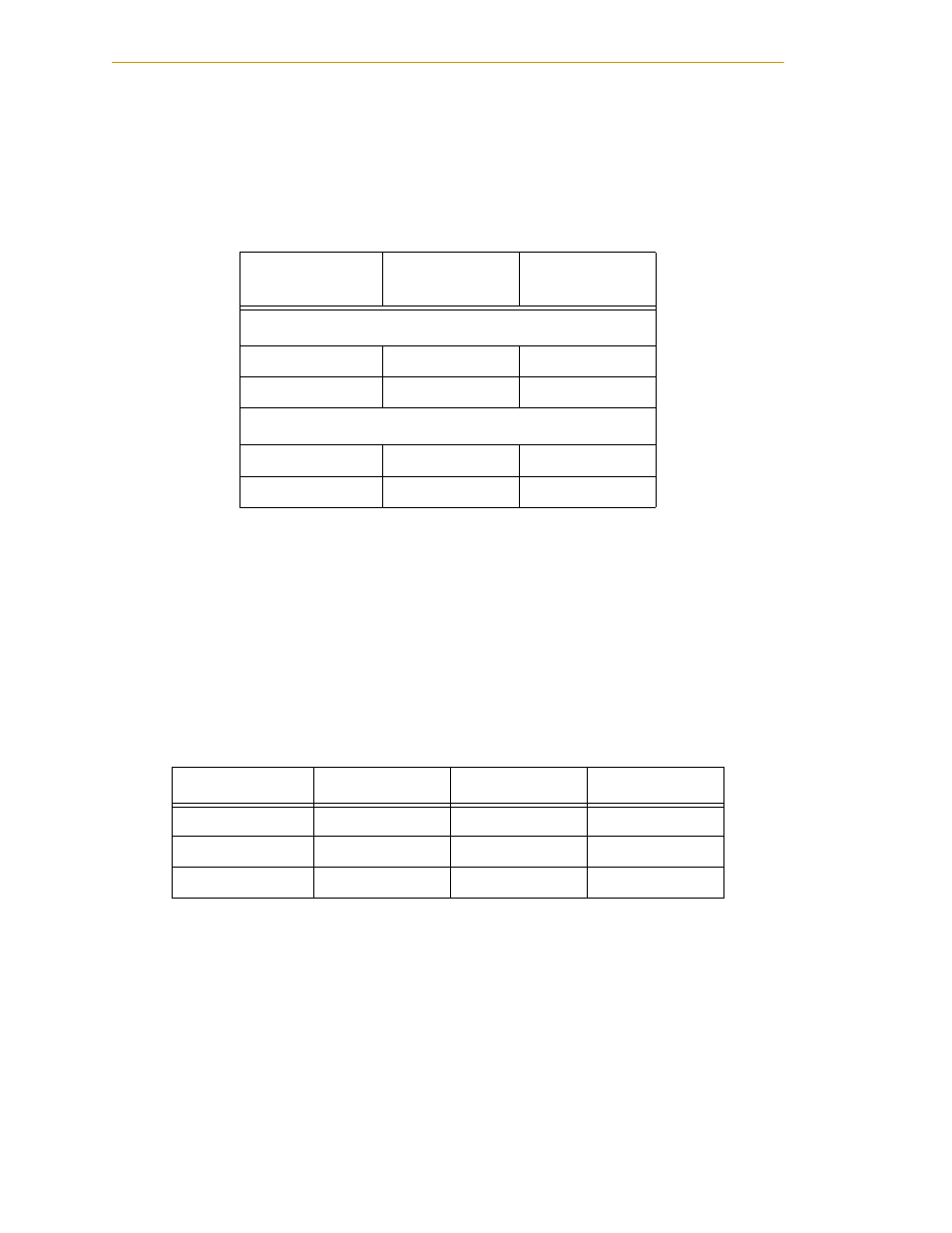
Linear module repeatability is a function of linear resolution, servo performance, ball
screw linear clearances, friction, payload, etc. Unidirectional and bidirectional
repeatability values as measured per ISO 232 for Python modules are specified in the
following table.
Thrust
Python linear modules are capable of generating significant intermittent axial thrust
forces for applications such as insertion. As long as the thrust force is applied slowly (i.e.
non-impacting) and the resultant pitch moments are within the Carriage Maximum
Transportable Moments specified in table
, the modules can
successfully perform millions of repeated operations. The maximum non-impact thrust
force capabilities are dependent upon the ball screw lead. See the following table for
details.
NOTE: Continuous thrust values are approximately 30% of the values
listed above, limited by the motor duty cycle limitations.
Brakes
Python linear modules can be configured with or without payload-holding brakes. The
brakes used on L18 and L12 modules are ball screw shaft-mounted brakes and are located
at the end of the module, opposite the motor. L08 modules use motor-mounted brakes.
Table 3-10. Linear Module Repeatability
In-Line Motors
Wrap-Around
Motors
Ground Screws:
Unidirectional
±6 µm
±15 µm
Bidirectional
±8 µm
±20 µm
Rolled Screws:
Unidirectional
n/a
±20 µm
Bidirectional
n/a
±50 µm
Table 3-11. Maximum Non-impact Axial Thrust Force
Module
5 mm Pitch
10 mm Pitch
20 mm Pitch
L18
n/a
200 kg
100 kg
L12
n/a
200 kg
100 kg
L08
140 kg
70 kg
35 kg