Adept Python User Manual
Page 40
Chapter 3 - Python Linear Module Descriptions
40
Adept Python Modules User’s Guide, Rev. E
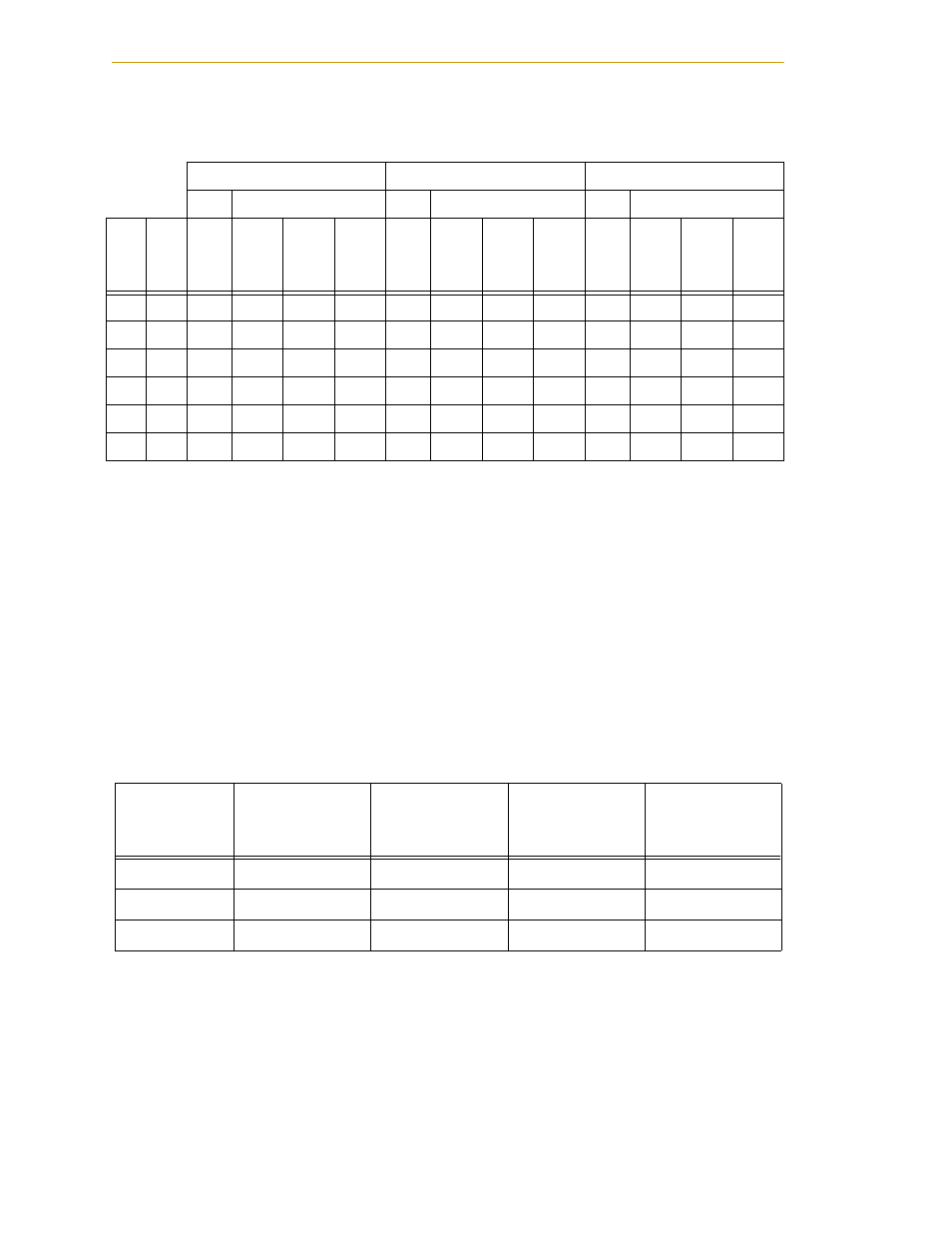
NOTE: Maximum payloads require decreased duty cycle for continuous
operation. Please contact Adept sales for more information.
NOTE: These values apply at 15,000 km of travel which is equivalent to 25
million 300 mm pick and place cycles. For 10,000 km of travel, multiply
all values by 1.14. For 5,000 km of travel, multiply all values by 1.44.
These values are calculated in a traditional manner and assume constant
velocity, they do not take moments caused by acceleration into account.
The motors used in Python modules are high-quality AC servo motors manufactured by
Yaskawa corporation. These motors employ serial absolute encoders. The motor model
numbers, size, maximum torque values, and encoder resolution are provided here for
reference.
Table 3-3. Carriage Maximum Payload and Transportable Moments
Horizontal Mount
Vertical Mount
Side Mount
Moments
Moments
Moments
Mod.
Type
Pitch
(mm)
Max
Pay-
load
(kg)
Roll
(N·m)
Pitch
(N·m)
Yaw
(N·m)
Max
Pay-
load
(kg)
Roll
(N·m)
Pitch
(N·m)
Yaw
(N·m)
Max
Pay-
load
(kg)
Roll
(N·m)
Pitch
(N·m)
Yaw
(N·m)
L18
10
80
400
450
325
40
n/a
420
430
80
330
270
450
20
30
330
500
530
20
n/a
300
320
30
250
400
500
L12
10
40
130
160
105
30
n/a
120
140
40
100
80
140
20
20
100
160
160
15
n/a
90
100
20
80
130
160
L08
10
10
16
25
13
8
n/a
16
18
10
10
8
20
20
5
12
25
19
5
n/a
10
11
5
10
16
25
Table 3-4. Motors Used in Python Linear Modules
Module Type
Motor Type
Motor Size
(Watts)
Peak Torque
(N-m)
Encoder
Resolution
(Cnts/Rev)
L18
Sigma-II
400 W
3.82
65,536
L12
Sigma-II
400 W
3.82
65,536
L08
Sigma-III
150 W
1.43
131,072