Yaskawa Σ-V Series AC Servo Drives Rotational Motor MECHATROLINK-II User Manual
Page 313
9 Appendix
9-34
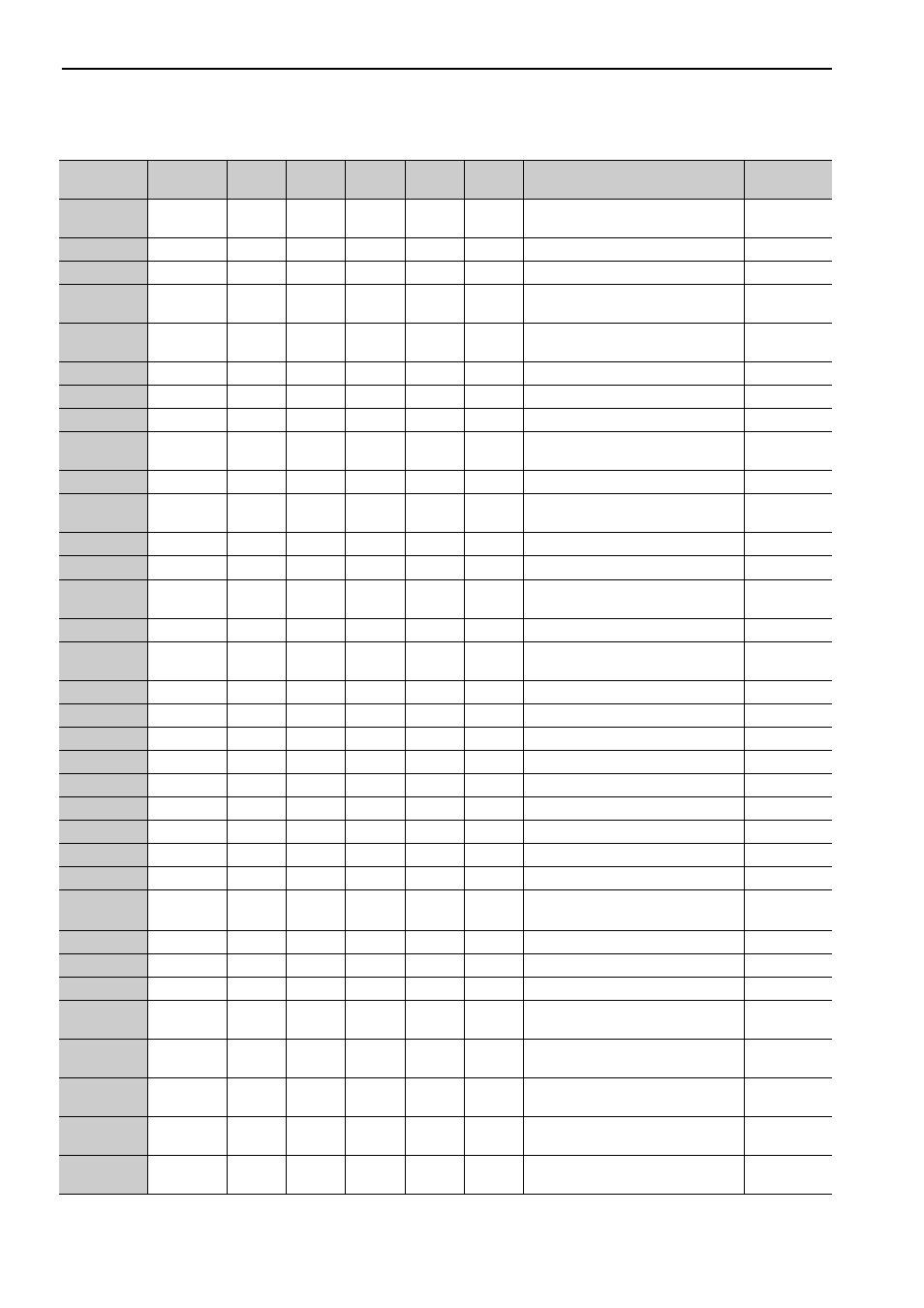
Pn520
5242880
Excessive Position Error Alarm
Level
Immediately
Pn522
7
Positioning Completed Width
Immediately
Pn524
1073741824
NEAR Signal Width
Immediately
Pn526
5242880
Excessive Position Error Alarm
Level at Servo ON
Immediately
Pn528
100
Excessive Position Error Warning
Level at Servo ON
Immediately
Pn529
10000
Speed Limit Level at Servo ON
Immediately
Pn52A
20
Reserved
−
Pn52B
20
Overload Warning Level
Immediately
Pn52C
100
Derating of Base Current at Detecting
Overload of Motor
After restart
Pn52F
0FFF
Reserved
−
Pn530
0000
Program JOG Operation Related
Switch
Immediately
Pn531
32768
Program JOG Movement Distance
Immediately
Pn533
500
Program JOG Movement Speed
Immediately
Pn534
100
Program JOG Acceleration/Decelera-
tion Time
Immediately
Pn535
100
Program JOG Waiting Time
Immediately
Pn536
1
Number of Times of Program JOG
Movement
Immediately
Pn550
0
Analog Monitor 1 Offset Voltage
Immediately
Pn551
0
Analog Monitor 2 Offset Voltage
Immediately
Pn552
100
Analog Monitor Magnification (
×
1)
Immediately
Pn553
100
Analog Monitor Magnification (
×
2)
Immediately
Pn560
400
Remained Vibration Detection Width
Immediately
Pn561
100
Overshoot Detection Level
Immediately
Pn600
0
Reserved
–
Pn601
0
Reserved
–
Pn800
0040
Communications Control
Immediately
Pn801
0003
Application Function Select 6
(Software LS)
Immediately
Pn803
10
Origin Range
Immediately
Pn804
1073741823
Forward Software Limit
Immediately
Pn806
-1073741823
Reverse Software Limit
Immediately
Pn808
0
Absolute Encoder Origin Offset
Immediately
∗
1
Pn80A
100
1st Linear Acceleration Constant
Immediately
∗
2
Pn80B
100
2nd Linear Acceleration Constant
Immediately
∗
2
Pn80C
0
Acceleration Constant Switching
Speed
Immediately
∗
2
Pn80D
100
1st Linear Deceleration Constant
Immediately
∗
2
∗1.
Enabled after the SENS_ON command is input.
∗2.
Change the setting when the reference is stopped (DEN is set to 1), because the change will affect the output during
operation.
(cont’d)
Parameter
Factory
Setting
Name
When
Enabled