Mecha – Yaskawa Σ-V Series AC Servo Drives Rotational Motor MECHATROLINK-II User Manual
Page 291
9 Appendix
9.1.2 Parameters
9-12
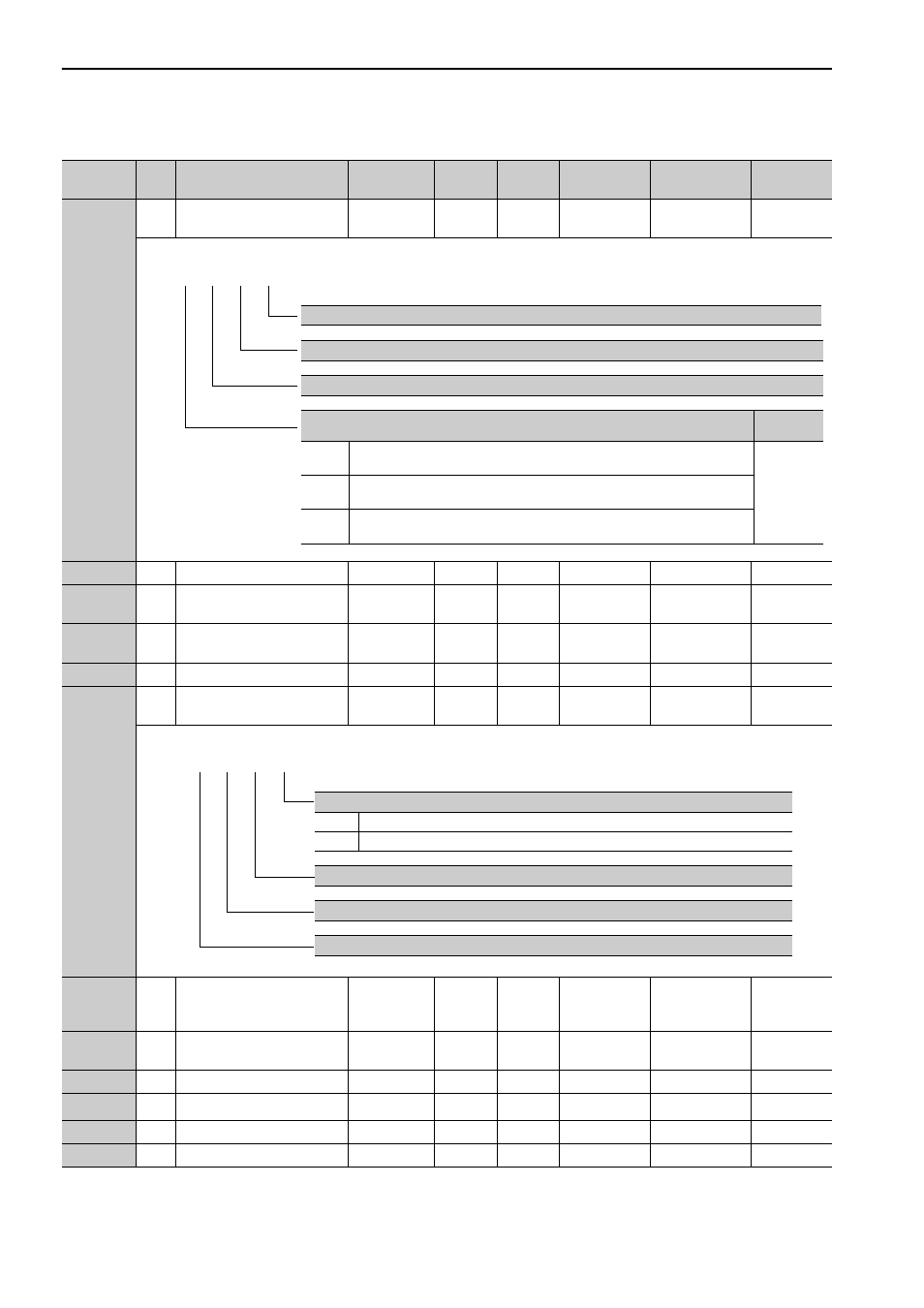
Pn207
2
Position Control Function
Switch
0000 to 2210
−
0010
After restart
Setup
−
Pn20A
4
Reserved (Do not change.)
−
−
32768
−
−
−
Pn20E
4
Electronic Gear Ratio
(Numerator)
1 to
1073741824
1
4
After restart
Setup
4.4.3
Pn210
4
Electronic Gear Ratio
(Denominator)
1 to
1073741824
1
1
After restart
Setup
4.4.3
Pn22A
2
Reserved (Do not change.)
−
−
0000
−
−
−
Pn230
2
Position Control Expanded
Function Switch
0000 to 0001
–
0000
After reset
Setup
5.8.6
Pn231
4
Backlash Compensation
Value
-50000 to
50000
0.1
refer-
ence unit
0
Immediately
Setup
5.8.6
Pn233
2
Backlash Compensation
Time Constant
0 to 65536
0.01 ms
0
Immediately
Setup
5.8.6
Pn281
2
Reserved (Do not change.)
−
−
20
−
−
−
Pn304
2
JOG Speed
0 to 10000
1 min
-1
500
Immediately
Setup
6.3
Pn305
2
Soft Start Acceleration Time
0 to 10000
1 ms
0
Immediately
Setup
*1
Pn306
2
Soft Start Deceleration Time
0 to 10000
1 ms
0
Immediately
Setup
*1
∗1.
For details, refer to
Σ
-V Series User’s Manual MECHATROLINK-II Commands
(Manual No.: SIEP S800000 54).
(cont’d)
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classification
Reference
Section
4th 3rd 2nd 1st
digit digit digit digit
n.
MECHA
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
/COIN Output Timing
Reference
Section
0
Outputs when the position error absolute value is the same or less than the position-
ing completed width (Pn522).
4.8.6
1
Outputs when the position error absolute value is the same or less than the position-
ing completed width (Pn522), and the reference after position reference filtering is 0.
2
Outputs when the position error absolute value is the same or less than the position-
ing completed width (Pn522), and the position reference input is 0.
Backlash Compensation Direction
0
Compensates with a reference in the forward direction.
1
Compensates with a reference in the reverse direction.
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.