M-ii – Yaskawa Σ-V Series AC Servo Drives Rotational Motor MECHATROLINK-II User Manual
Page 23
1.3 SERVOPACK Ratings and Specifications
1-5
1
Outline
∗1.
Speed regulation by load regulation is defined as follows:
∗2.
Refer to
4.2.10 Velocity Control (VEL CTRL: 3CH)
of
Σ
-V Series User’s Manual MECHATROLINK-II Commands
(Manual No.: SIEP S800000 54) for details on the soft start function.
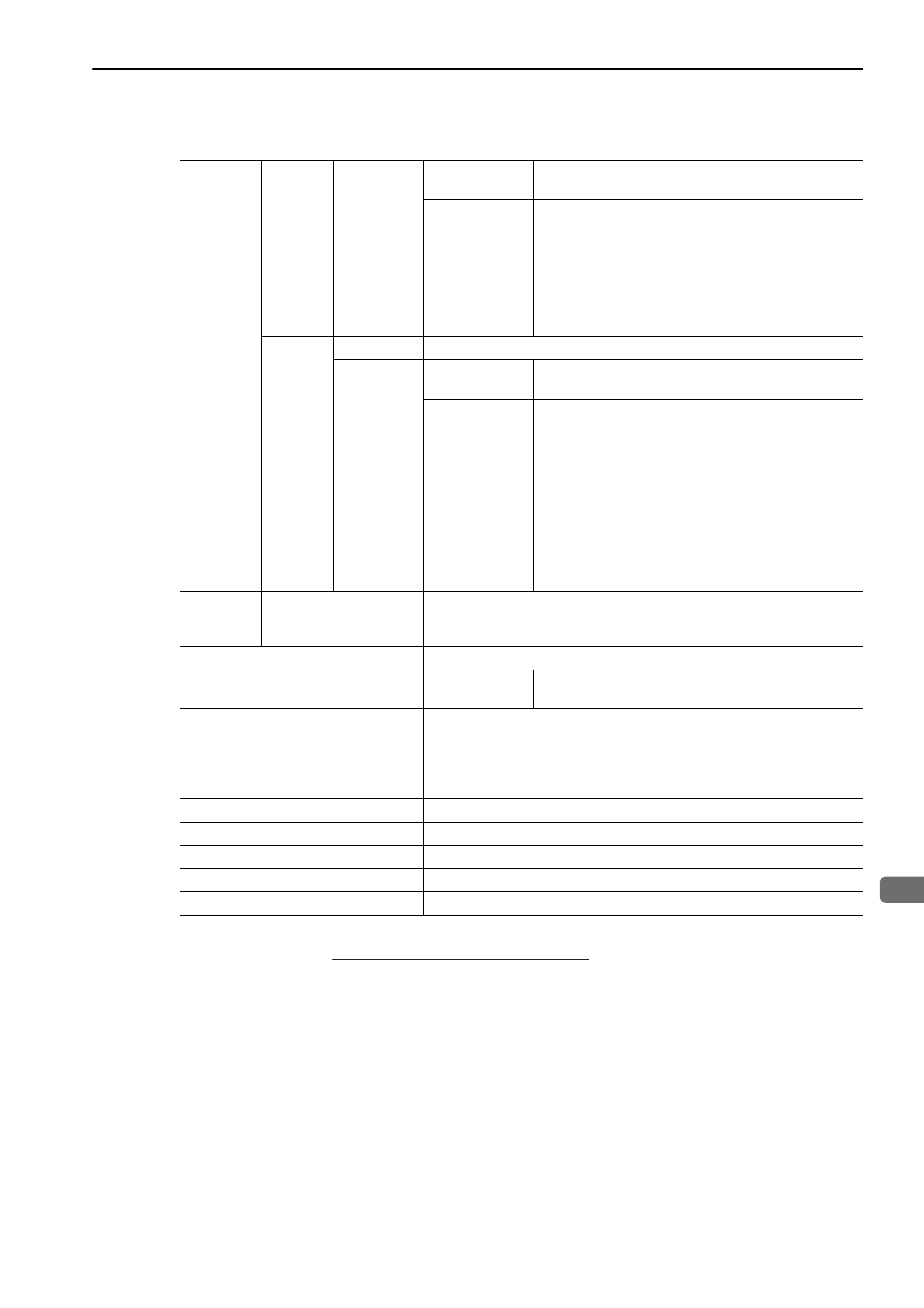
I/O
Signals
Sequence
Input
Input
Signals
which can
be allocated
Number of
Channels
3 ch
Functions
• Homing deceleration switch (/DEC)
• External latch (/EXT 1)
• Forward run prohibited (P-OT), reverse run prohibited
(N-OT)
• Forward external torque limit (/P-CL), reverse external
torque limit (/N-CL)
Signal allocations can be performed, and positive and
negative logic can be changed.
Sequence
Output
Fixed Output
Servo alarm (ALM)
Output
Signals
which can
be allocated
Number of
Channels
3 ch
Functions
• Positioning completion (/COIN)
• Speed coincidence detection (/V-CMP)
• Rotation detection (/TGON)
• Servo ready (/S-RDY)
• Torque limit detection (/CLT)
• Speed limit detection (/VLT)
• Brake (/BK)
• Warning (/WARN)
• Near (/NEAR)
Signal allocations can be performed, and positive and
negative logic can be changed.
Communi-
cations
Function
Personal Computer
Communications (USB)
Supports SigmaWin+.
Based on the USB 1.1 standard (12 Mbps).
LED Display
ALM (red), RDY (green), COM (green)
MECHATROLINK-
II
Communications Setting Switches
DIP Switch
(SW1, SW2)
Number of pins: four pins
×
2 switches (Refer to
4.1.1
)
Analog Monitor
Number of points: 2
Output voltage:
±
10 VDC (linearity effective range
±
8 V)
Output through the analog monitor unit (model: JUSP-PC001-E), the connec-
tion cable (model: JZSP-CF1S06-A3-E), and the analog monitor cable
(model: JZSP-CA01-E).
Dynamic Brake (DB)
Not supported.
Regenerative Processing
Not supported.
Overtravel Prevention (OT)
Deceleration to a stop or free run to a stop at P-OT or N-OT
Protective Function
Overcurrent, overvoltage, overload, and so on.
Utility Function
Gain adjustment, alarm history, JOG operation, origin search, and so on.
(cont’d)
Speed regulation
=
No-load motor speed
Total load motor speed
Rated motor speed
×
100%
-
M-II