9 starting and stopping motion, 1 starting motion, 1 from assignments – Emerson P/N 400361-00 User Manual
Page 91
Starting and Stopping Motion www.emersonct.com 77
9 Starting and
Stopping Motion
9.1 Starting Motion
All of the motion types described in “How Motion Works” on
page 23 can be initiated using multiple methods. The two
different methods are from assignments, and from user
programs. The following section details how each of the
different motions are initiated from both assignments and
from user programs.
9.1.1 From Assignments
In order to initiate motion from an assignment, a Source
must be assigned to one of the Destinations listed below on
the Assignments view in PowerTools Pro. Some
Destinations are level sensitive while others are edge
sensitive. Each of the Destinations associated with starting
motion are listed below.
9.1.1.1 Jog.PlusActivate
Jog.PlusActivate will, when active, cause the motor to run
at a specified Jog Velocity in the positive direction.
Jog.PlusActivate is a level sensitive assignment meaning
that as long as the Destination is active, the Jog will be
active. The status of the Jog.Select destination determines
which jog profile is used when Jog.PlusActivate activates.
If Jog.Select is off (or inactive) then the Jog 0 profile will be
used. If Jog.Select is active, then the Jog 1 profile is used.
To stop the jogging motion, simply deactivate the
Jog.PlusActivate Destination. The motor will then
decelerate using the selected Jog Deceleration ramp.
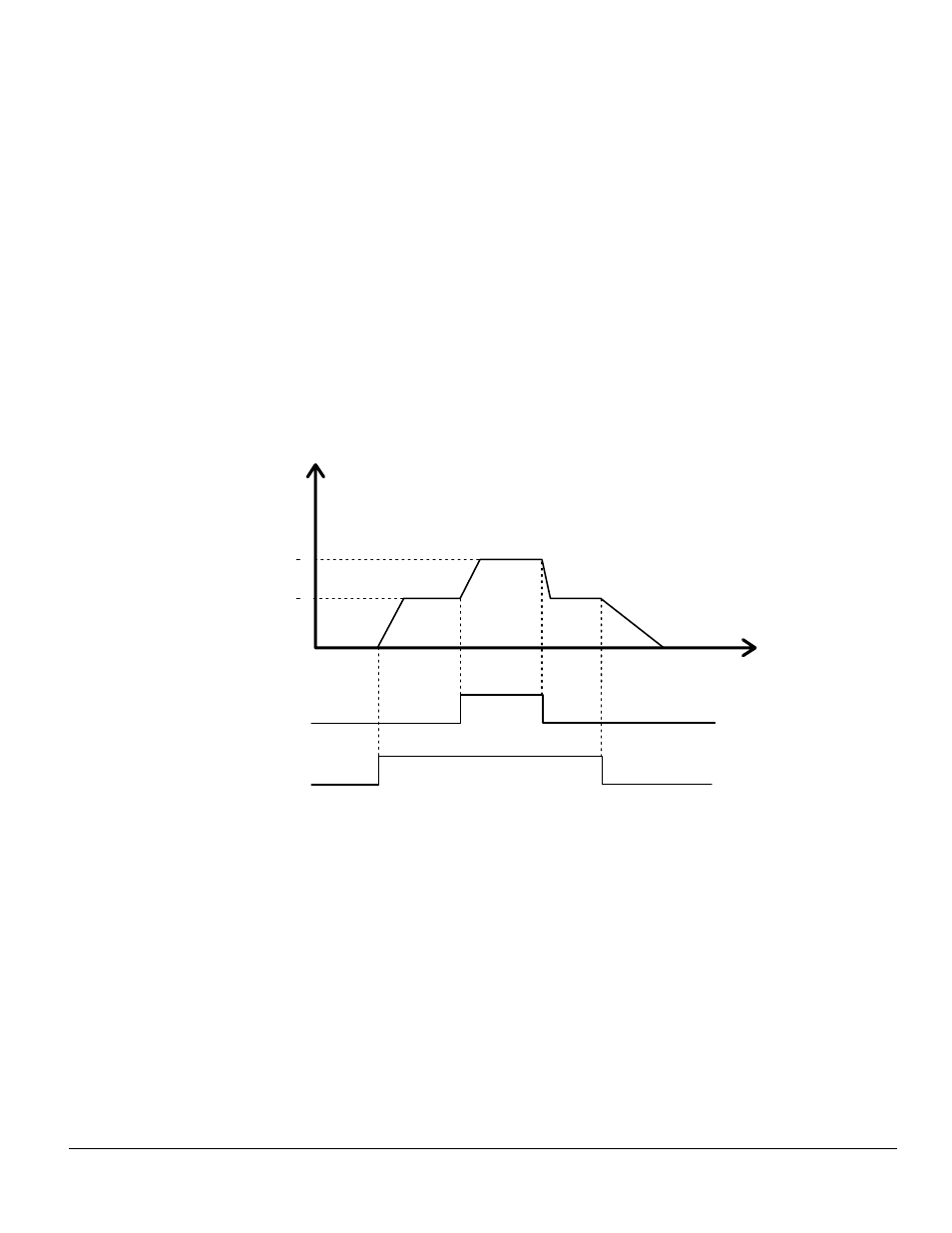
If Jog.Select activates or deactivates while Jogging is
active, the motor will change to the new Jog Velocity using
the new Jog Acceleration ramp. Jog Deceleration is only
used when Jogging motion is stopped. Figure 110 shows
an example of changing Jog.Select while Jog is active.
Figure 110:
Jog Select Example
9.1.1.2 Jog.MinusActivate
Jog.MinusActivate will, when active, cause the motor to run
at a specified Jog Velocity in the negative direction.
Jog.MinusActivate is a level sensitive assignment meaning
that as long as the Destination is active, the Jog will be
active. The status of the Jog.Select destination determines
which jog profile is used when Jog.MinusActivate
activates. If Jog.Select is off (or inactive) then the Jog 0
profile will be used. If Jog.Select is active, then the Jog 1
profile is used.
To stop the jogging motion, simply deactivate the
Jog.MinusActivate Destination. The motor will then
decelerate using the selected Jog Deceleration ramp.
If Jog.Select activates or deactivates while Jogging is
active, the motor will change to the new Jog Velocity using
the new Jog Acceleration ramp. Jog Deceleration is only
used when Jogging motion is stopped. Figure 110 above
shows an example of changing Jog.Select while Jog is
active.
9.1.1.3 Jog.Select
Jog.Select is used solely to determine which Jog Profile is
selected when the Jog.PlusActivate or Jog.MinusActivate
are activated. To select Jog 0, Jog.Select should be
inactive. To select Jog 1, Jog.Select should be active.
9.1.1.4 Home.#.Initiate
The Home.#.Initiate Destination is used to start the home
sequence as defined on the Home view. Home.#.Initiate is
Jog.PlusActivate
Jog.Select
Jog.0.Velocity
Jog.1.Velocity
Jog.0.Accel
Jog.1.Accel
Jog.1.Decel
Jog.0.Decel