Yaskawa P7 to P1000 User Manual
Page 36
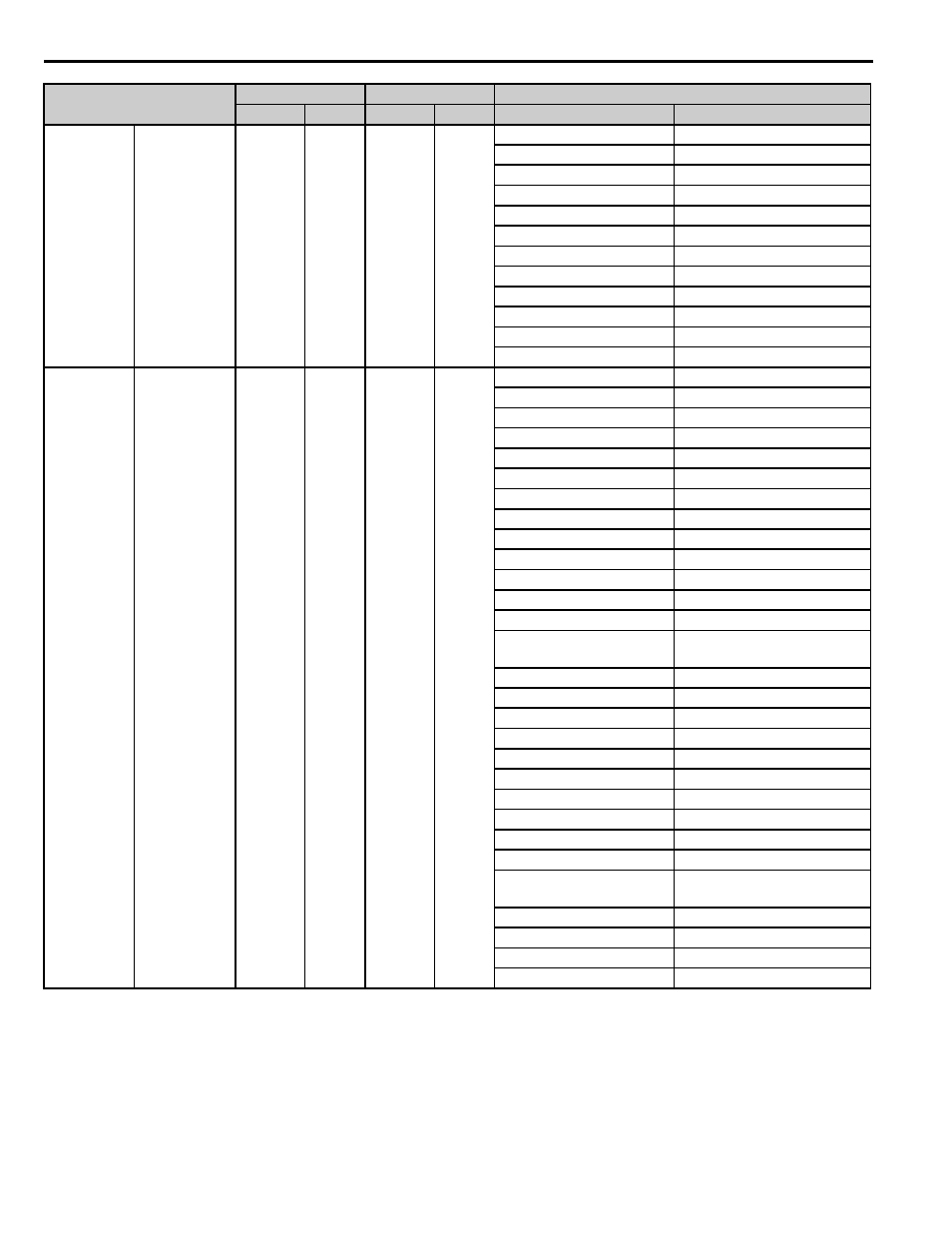
13 Appendix 2 Parameter Cross Reference
36
YASKAWA PL.P1000.01 P7 to P1000 - Product Transition Guide
Multi-Function
Relay Output
Terminal M1 and
M2 Function
Selection
H2-01
0
H2-01
0
6: Drive ready
6: Drive ready
7: DC bus undervoltage
7: DC bus undervoltage
8: Baseblock 1 (N.O.)
8: Baseblock 1 (N.O.)
9: Option reference
9: Freq ref source
A: Local/Remote operation
A: Run cmd source
B: Torque detection 1 (N.O.)
B: Torque detection 1 (N.O.)
C: Frequency reference loss
C: Frequency reference loss
D: Braking resistor overheat
D: Braking resistor overheat
E: Fault
E: Fault
F: Not used
F: Through-mode / Not Used
10: Minor Fault - Alarm
10: Minor Fault - Alarm
11: Reset command active
11: Fault reset command active
Multi-Function
Relay Output
Terminal M3-
M4 Function
Selection
H2-02
A
H2-02
1
12: Timer output
12: Timer output
—
13: Speed agree 2
—
14: User-Set speed agree 2
—
15: Frequency detection 3
—
16: Frequency detection 4
17: Torque detection 1 (N.C.) 17: Torque detection 1 (N.C.)
—
18: Torque detection 2 (N.O.)
—
19: Torque detection 2 (N.C.)
1A: Reverse run
1A: During reverse
—
1B: During baseblock (N.C.)
1E: Fault restart enabled
1E: Fault restart enabled
1F: Motor overload alarm
1F: Motor overload alarm
20: Drive overheat pre-alarm 20: Drive overheat pre-alarm
—
22: Mechanical weakening
detection
—
2F: Maintenance period
—
37: During Run 2
38: Drive Enable
38: Drive enabled
39: Waiting to Run
—
—
39: Watt hour pulse
3A: OH Freq. Reference
—
3B: Run SRC Com/OPT
—
—
3C: LOCAL/REMOTE mode
3D: Cooling Fan Err
—
—
3D: During Speed Search
—
3E: PID feedback low
(during loss)
—
3F: PID feedback high (fault)
—
4A: During KEB Ride-thru
—
4C: During Fast Stop
—
4D: oH pre-alarm time limit
Parameter Name
P7
P1000
Setting
Parameter
Default
Parameter
Default
P7
P1000