Yaskawa P7 to P1000 User Manual
Page 35
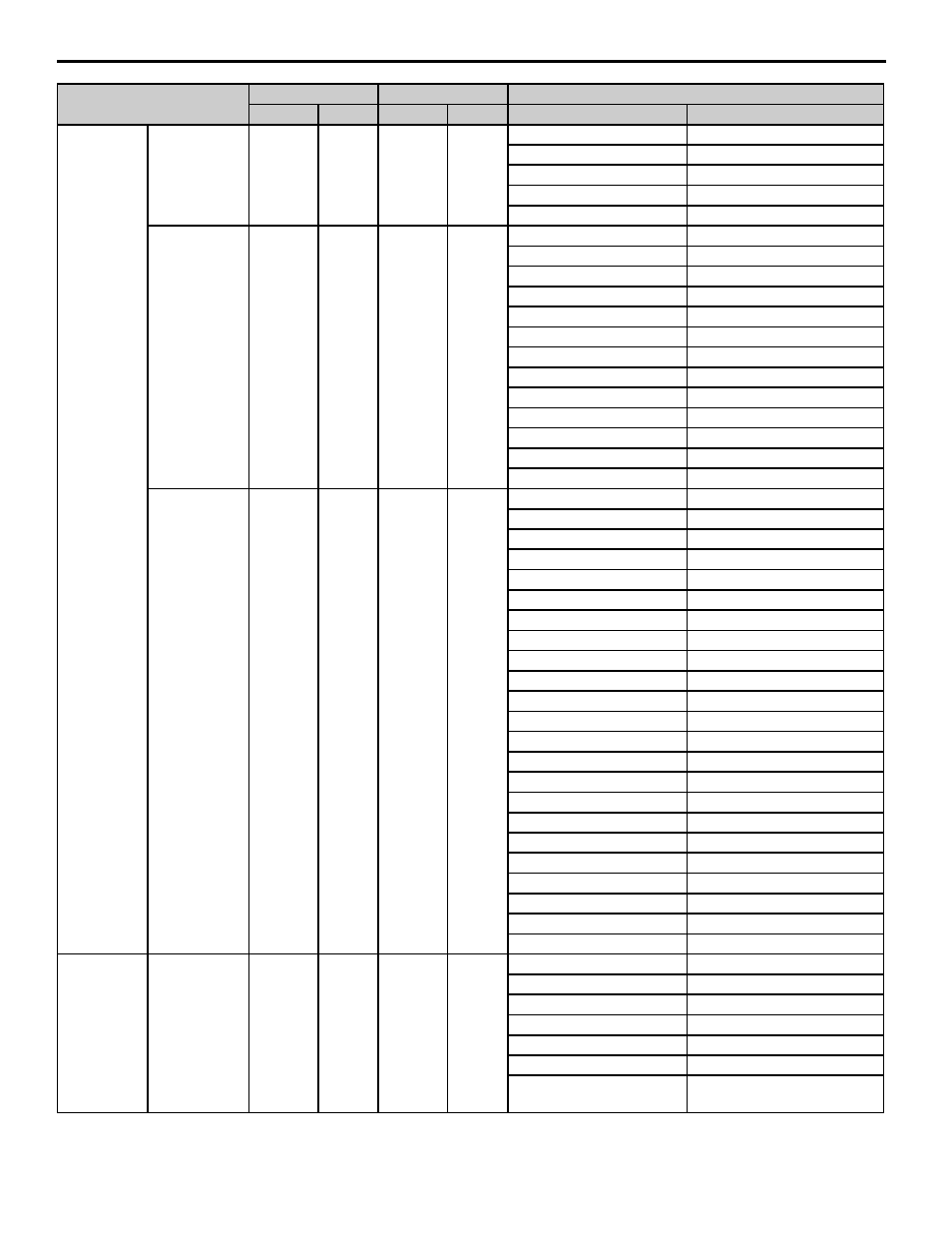
13 Appendix 2 Parameter Cross Reference
YASKAWA PL.P1000.01 P7 to P1000 - Product Transition Guide
35
Multi-Function
Relay Input
Terminal S6
Function
Selection
H1-04
4 (3)
H1-06
4 (3)
36: Option/Inv Sel 2
—
—
40: Forward run command
—
41: Reverse run command
—
42: Run command
—
43: Forward/Reverse command 2
Terminal S7
Function
Selection
H1-05
6 (4)
H1-07
6 (4)
—
47: CanOpen Node setup
—
51:Sequence Timer Disable
—
52: Sequence Timer Cancel
60: DC Injection Braking
60: DC Injection Braking
61: Speed search 1
61: Speed search 1
62: Speed search 2
62: Speed search 2
—
63: Magnetic field weakening
64: Speed search 3
—
—
65: KEB Ride-thru (N.C.)
—
66: KEB Ride-thru (N.O.)
67: Comm. test mode
67: Comm. test mode
68: High Slip Braking
68: High Slip Braking
69: Jog 2
—
Terminal S8
Function
Selection
H1-06
8 (6)
H1-08
8 (6)
6A: Drive Enable
6A: Drive enable
6B: Com/Inv Sel
—
6C: Com/Inv Sel 2
—
6D: Auto Mode Sel
—
6E: Hand Mode Sel
—
70: Bypass/Drv Enbl.
—
80: Motor Preheat 2
—
81: EmergOverrideFWD
—
82: EmergOverrideREV
—
—
75: UP 2
—
76: DOWN 2
—
7A: KEB Ride-Thru 2 (N.C.)
—
7B: KEB Ride-Thru 2 (N.O.)
—
7E: PG Rotate Rev
—
7F: PID Bidirectional Enable
—
A8: PI2 Diable (N.O.)
—
A9: PI2 Diable (N.C.)
—
AA: PI2 Invert
—
AB: PI2 Integral Reset
—
AC: PI2 Integral Hold
—
AD: Select PI2 Parameters
—
AF: Emergency Override Forward
—
B0: Emergency Override Reverse
Multi-Function
Relay Output
Terminal M1 and
M2 Function
Selection
H2-01
0
H2-01
0
H2-01 to H2-03
H2-01 to H2-03
0: During Run 1
0: During run
1: Zero Speed
1: Zero speed
2: Fref/Fout Agree 1
2: Fref/Fout Agree 1
3: Fref/Set agree 1
3: Fref/Set agree 1
4: Frequency detection 1
4: Frequency detection 1
5: Frequency detection 2
(used when L4-07 = 1)
5: Frequency detection 2
(used when L4-07 = 1)
Parameter Name
P7
P1000
Setting
Parameter
Default
Parameter
Default
P7
P1000