Sm-ethercat user guide, Freeze object – Emerson SM-ETHERCAT 0471-0128-02 User Manual
Page 53
SM-EtherCAT User Guide
53
Issue Number: 2
www.controltechniques.com
S
In
Mech
El
Ge
tting
S
P
Dri
ve
Adv
Di
Q
G
In
0x2804 Freeze object
This object is used to configure the freeze function that can be used within the Homing
mode profile. Table 7.55 Freeze object on page 53 specifies the object description.
Table 7.55 Freeze object
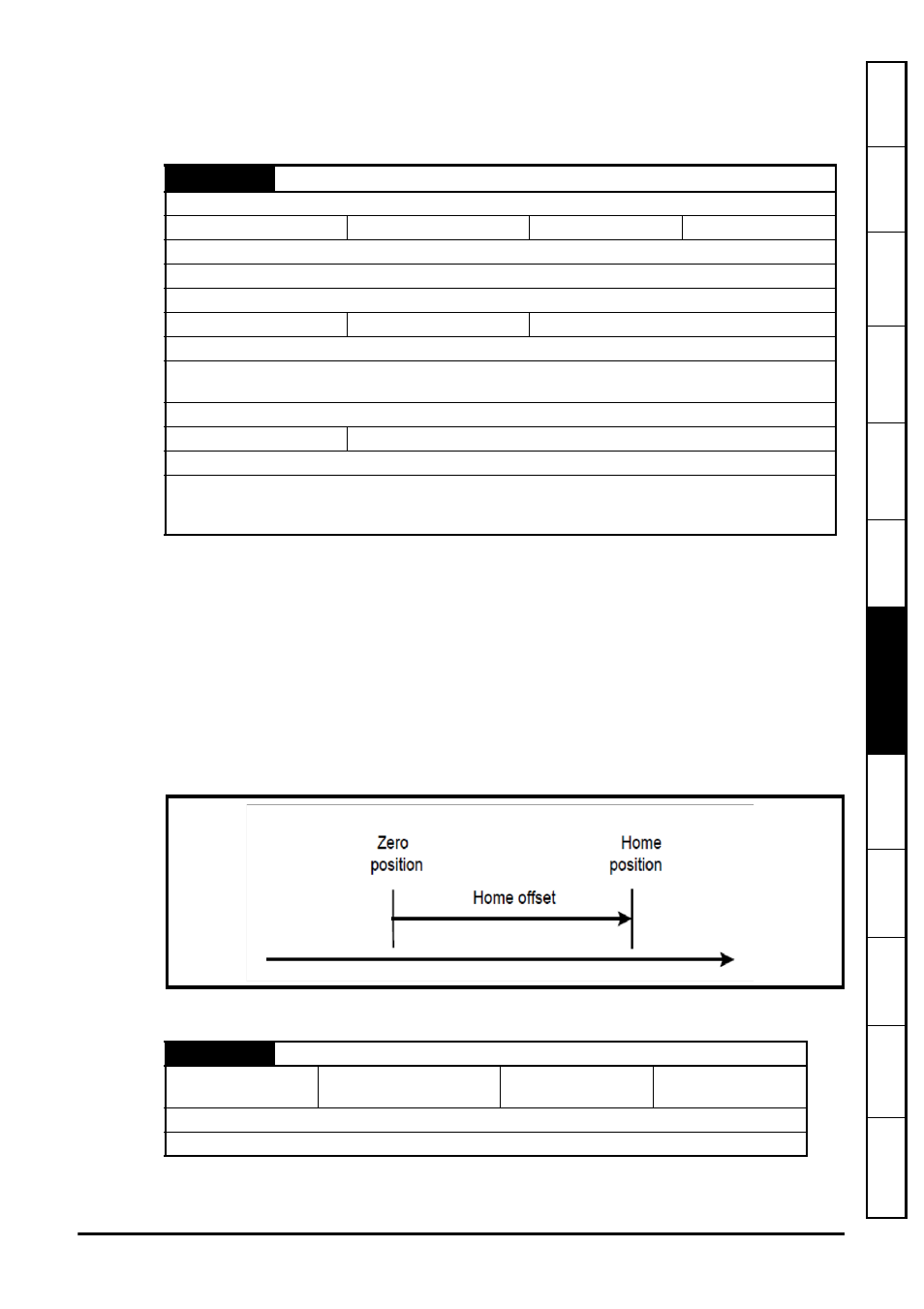
0x607C Home offset
This object indicates the configured difference between the zero position for the
application and the machine home position (found during homing). During homing the
machine home position is found and once the homing is completed the zero position is
offset from the home position by adding the home offset to the home position. All
subsequent absolute moves shall be taken relative to this new zero position. This is
illustrated in Figure 7-11 Home offset definition on page 53. The value of this object
shall be given in user-defined position units. Negative values indicate the opposite
direction.
Figure 7-11 Home offset definition
Table 7.56 Home offset
0x2804
Freeze object
Sub-index 0
Access: RO
Range: N/A
Size: Unigned 8
Unit: N/A
Default: 2
Description: The number of the last sub-index in this object.
Sub-index 1
Access: RW
Range: 0 to 1
Size: Unsigned 8
Unit: N/A
Default: 0
Description: Route the option freeze onto the drive. Setting a value of 1 here will route the option
digital input 0 onto the drive freeze line.
Sub-index 2
Access: RW
Range: 0 to 1
Size: Unsigned 8
Unit: N/A
Default: 0
Description: Option to drive freeze invert. Setting a value of 1 will invert the freeze signal routed onto
the drive from the option input 0 (if 0x2804, sub-index 1 is set to 1). This value will be read only on a
transition from 0 to 1 in sub-index 1.
0x607C
Home offset
Access: RW
Range: -32768 to
+32767
Size: Signed 32
Unit: User-defined
position units
Default: 0
Description:
Homing offset value.