1 general homing definitions – Emerson SM-ETHERCAT 0471-0128-02 User Manual
Page 48
48
SM-EtherCAT User Guide
www.controltechniques.com
Issue Number: 2
By choosing a homing method the following behaviour is determined: The homing signal
(positive limit switch, negative limit switch, home switch), the direction of actuation and
where appropriate the position of the index pulse.
An encircled number in Figure 7-3 to Figure 7-10 indicates the code for selection of this
homing position. The direction of movement is also indicated.
There are four sources of homing signal available: These are the negative and positive
limit switches, the home switch and the index pulse from an encoder.
In the diagrams of homing sequences shown below, the encoder count increases as the
axis's position moves to the right, in other words the left is the minimum position and the
right is the maximum position.
7.7.1
General homing definitions
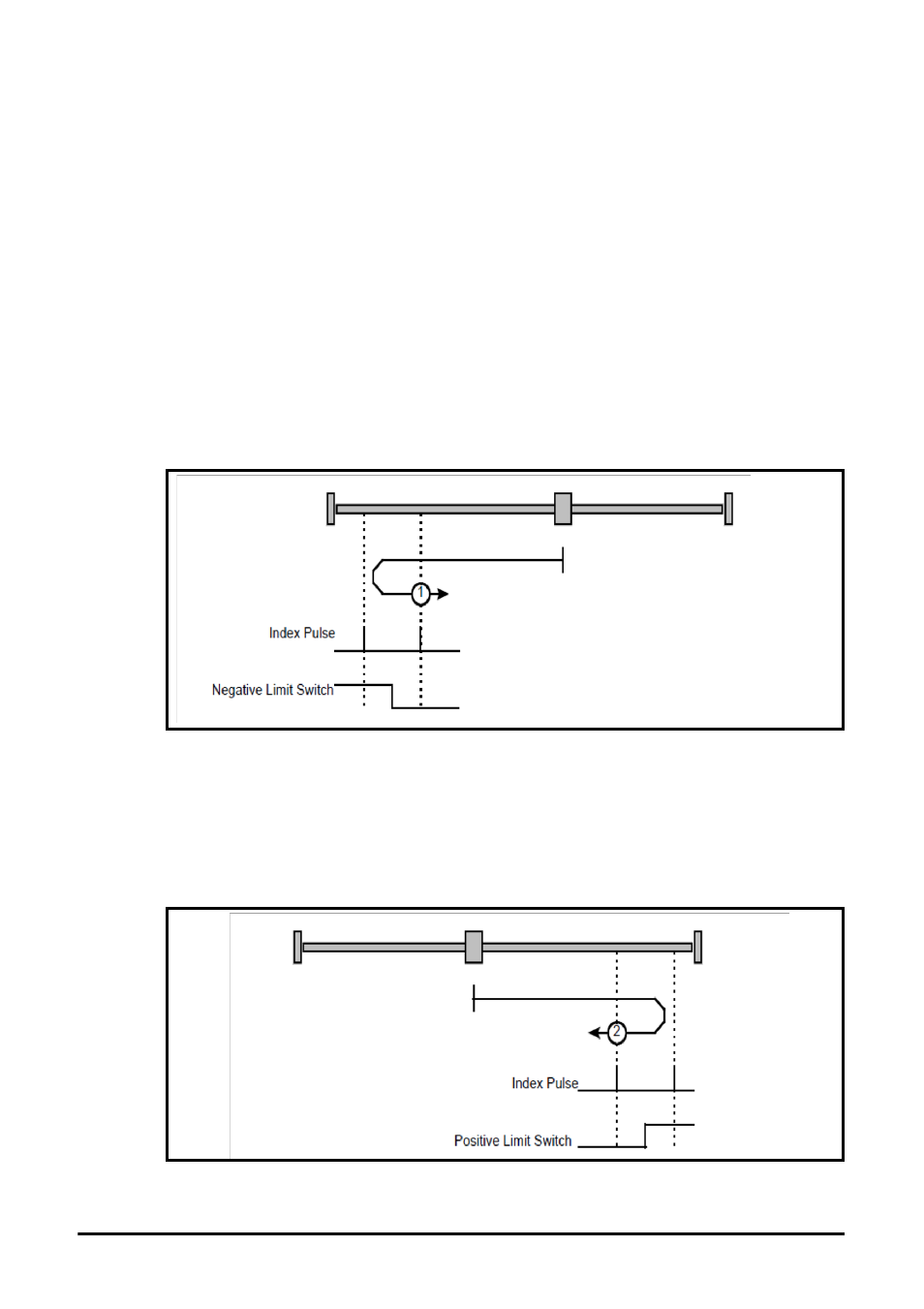
Method 1: Homing on negative limit switch and index pulse
Using this method as shown in Figure 7-3 Homing on negative limit switch and index
pulse on page 48, the initial direction of movement shall be leftward if the negative limit
switch is inactive (here: low). The home position shall be at the first index pulse to the
right of the position where the negative limit switch becomes inactive.
Figure 7-3 Homing on negative limit switch and index pulse
Method 2: Homing on positive limit switch and index pulse
Using this method as shown in Figure 7-4 Homing on positive limit switch and index
pulse on page 48, the initial direction of movement shall be rightward if the positive limit
switch is inactive (here: low). The position of home shall be at the first index pulse to the
left of the position where the positive limit switch becomes inactive.
Figure 7-4 Homing on positive limit switch and index pulse