2 0x6041 statusword, 3 common profile features, 1 sequencing control – Emerson SM-ETHERCAT 0471-0128-02 User Manual
Page 29: 2 0x6041, Statusword, 3 common, Profile, Features
SM-EtherCAT User Guide
29
Issue Number: 2
www.controltechniques.com
S
In
Mech
El
Ge
tting
S
P
Dri
ve
Adv
Di
Q
G
In
7.2
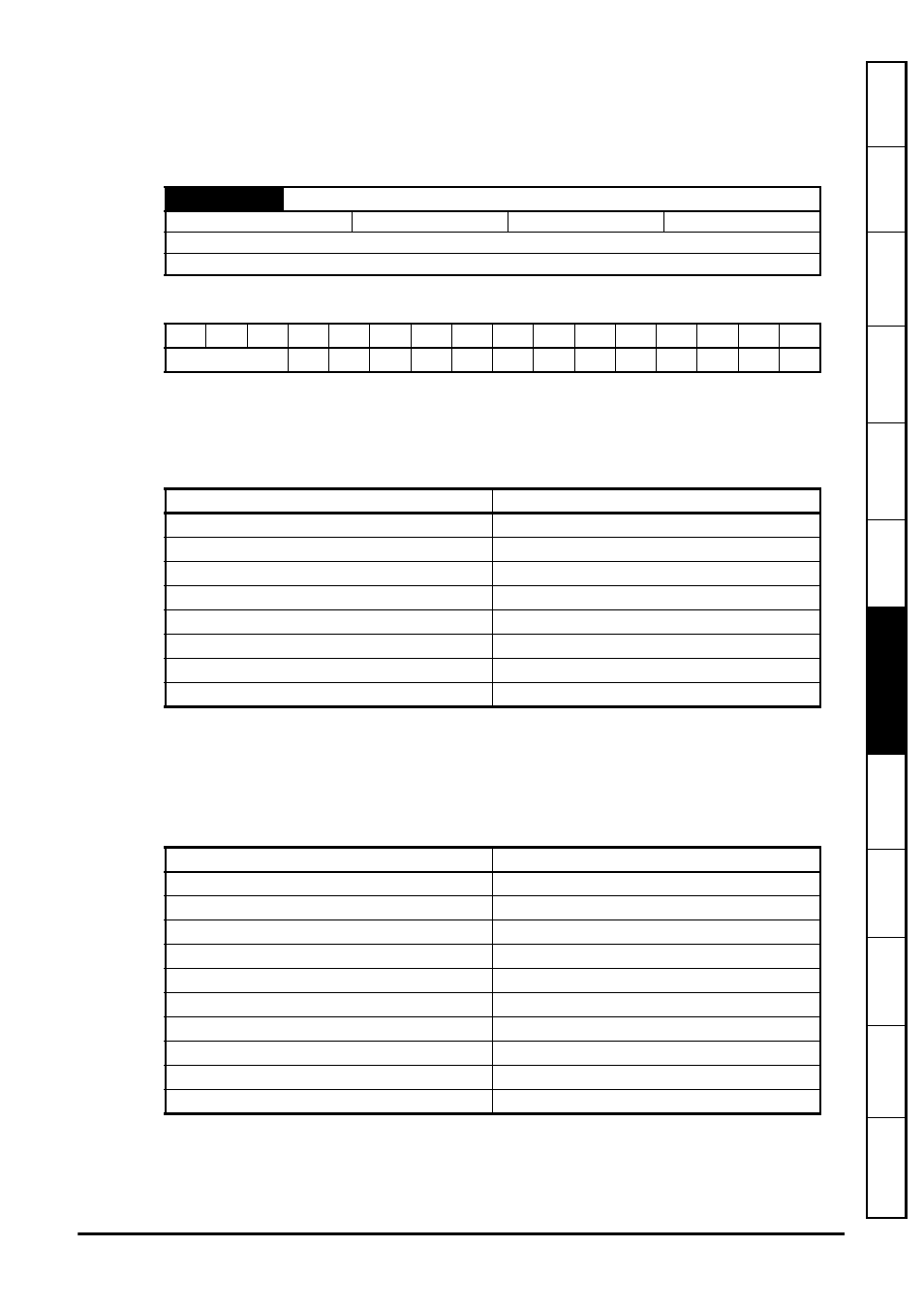
0x6041 Statusword
This provides feedback about the current operating state of the drive. Table 7.4
describes the format of the status word and illustrates how the individual statusword bits
are combined to represent the current state of the drive.
LEGEND: ms = manufacturer-specific; ha = homing attained; oms = operation mode specific; ila =
internal limit active; tr = target reached; rm = remote; w = warning; sod = switch on disabled; qs =
quick stop; ve = voltage enabled; f = fault; oe = operation enabled; so = switched on; rtso = ready to
switch on
7.3
Common profile features
7.3.1
Sequencing control
These are the supported objects used to control the drive:
Table 7.4 Statusword
0x6041
Statusword
Access: RW
Range: 0 to 65535
Size: Unsigned 16
Unit: N/A
Default:
N/A
Description:
This provides feedback about the current operating state of the drive.
Table 7.5 Statusword bit functions
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
ms
ha
lla
tr
rm
ms
w
sod
qs
ve
f
oe
so
rtso
Table 7.6 State coding
Statusword
State
xxxx xxxx x0xx 0000b
Not ready to switch on
xxxx xxxx x1xx 0000b
Switch on disabled
xxxx xxxx x01x 0001b
Ready to switch on
xxxx xxxx x01x 0011b
Switched on
xxxx xxxx x01x 0111b
Operation enabled
xxxx xxxx x00x 0111b
Quick stop active
xxxx xxxx x0xx 1111b
Fault reaction active
xxxx xxxx x0xx 1000b
Fault
Table 7.7 Sequencing control supported objects
Index
Name
0x6040
controlword
0x6041
statusword
0x605B
shutdown_option_code
0x605C
disable_operation_option_code
0x605A
quick_stop_option_code
0x605D
halt_option_code
0x605E
fault_reaction_option_code
0x6060
modes_of_operation
0x6061
modes_of_operation_display
0x6085
quick_stop_deceleration