6 0x6060 modes_of_operation, 7 0x6061 modes_of_operation_display, 8 0x6085 quick_stop_deceleration – Emerson SM-ETHERCAT 0471-0128-02 User Manual
Page 35: Sm-ethercat user guide, Table 7.18 modes_of_operation values, Table 7.19 modes_of_operation_display, Table 7.20 modes_of_operation_display values, Table 7.21 quick_stop_deceleration
SM-EtherCAT User Guide
35
Issue Number: 2
www.controltechniques.com
S
In
Mech
El
Ge
tting
S
P
Dri
ve
Adv
Di
Q
G
In
7.3.6
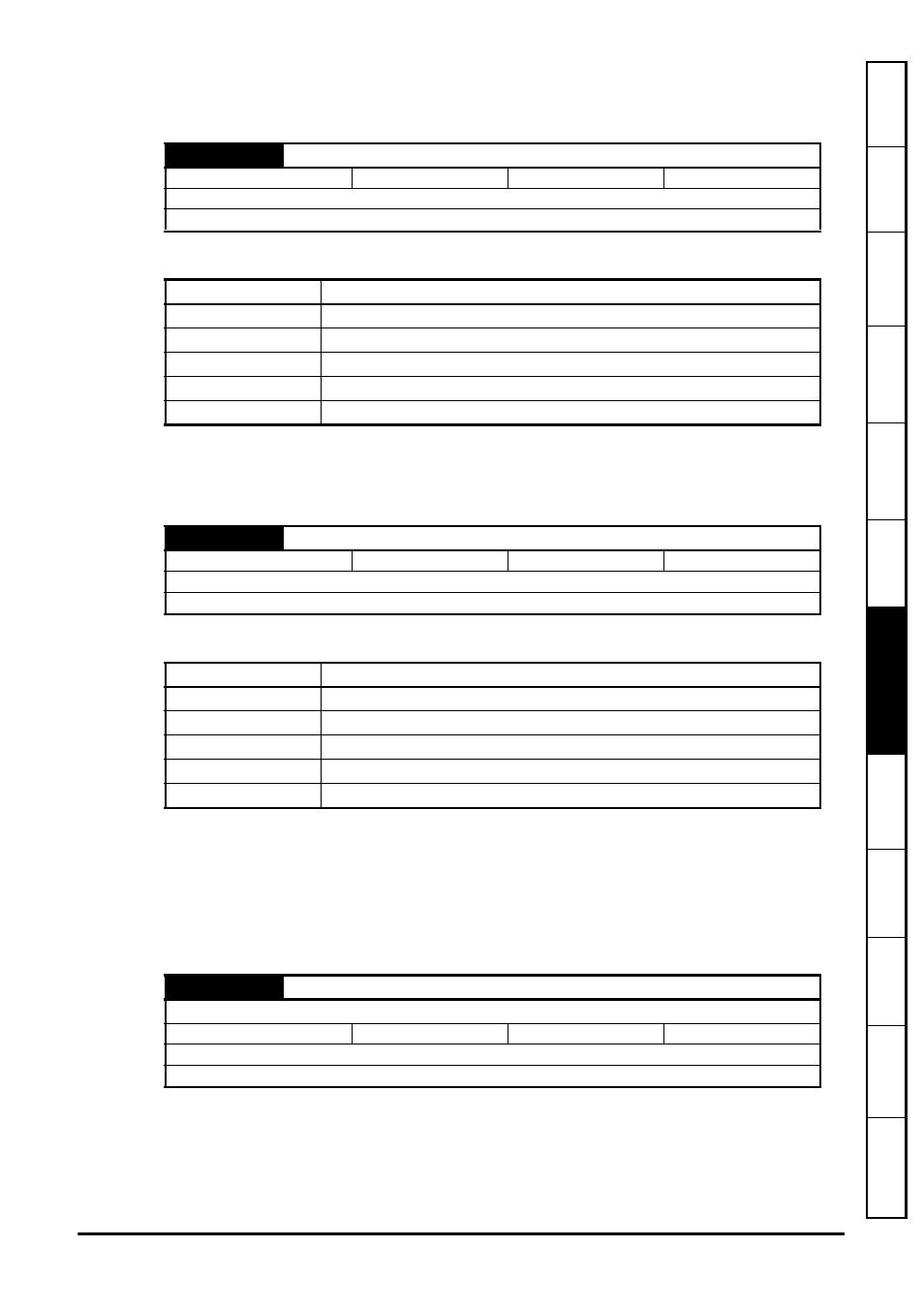
0x6060 Modes_of_operation
This object is used to request a change in the mode of operation.
7.3.7
0x6061 Modes_of_operation_display
This read only object indicates the active mode of operation.
7.3.8
0x6085 Quick_stop_deceleration
This object is used to configure the deceleration rate used to stop the motor when the
quick stop function is activated and the quick stop code object (0x605A) is set to 2 or 6.
The quick stop deceleration is also used if the fault reaction code object (0x605E) is 2.
The value is given in user-defined acceleration units.
Table 7.17 Modes_of_operation
0x6060
Modes_of_operation
Access: RW
Range: 0 to 7
Size: Unsigned 8
Unit: N/A
Default:
2
Description:
This object is used to request a change in the mode of operation.
Table 7.18 Modes_of_operation values
Value
Definition
0
No mode change
2
vl velocity mode
4
Profile torque mode
6
Homing mode
7
Interpolated position mode
Table 7.19 Modes_of_operation_display
0x6061
Modes_of_operation_display
Access: RO
Range: 0 to 7
Size: Unsigned 8
Unit: N/A
Default:
N/A
Description:
Used to provide the active mode of operation.
Table 7.20 Modes_of_operation_display values
Value
Definition
0
No mode change
2
vl velocity mode
4
Profile torque mode
6
Homing mode
7
Interpolated position mode
Table 7.21 Quick_stop_deceleration
0x6085
Quick_stop_deceleration
Sub-index 0
Access: RW
Range:0 to 0xFFFFFFFF
Size: Unsigned 32
Unit: N/A
Default:
2
Description:
Quick stop function for the positioning related modes.