5 proportional (required), 6 integral (required), 7 derivative (required) – Winco DPG-2145-001 User Manual
Page 18
Manual 36526F
DPG-21XX-00X Digital Controllers
Woodward
10
100%
0%
50%
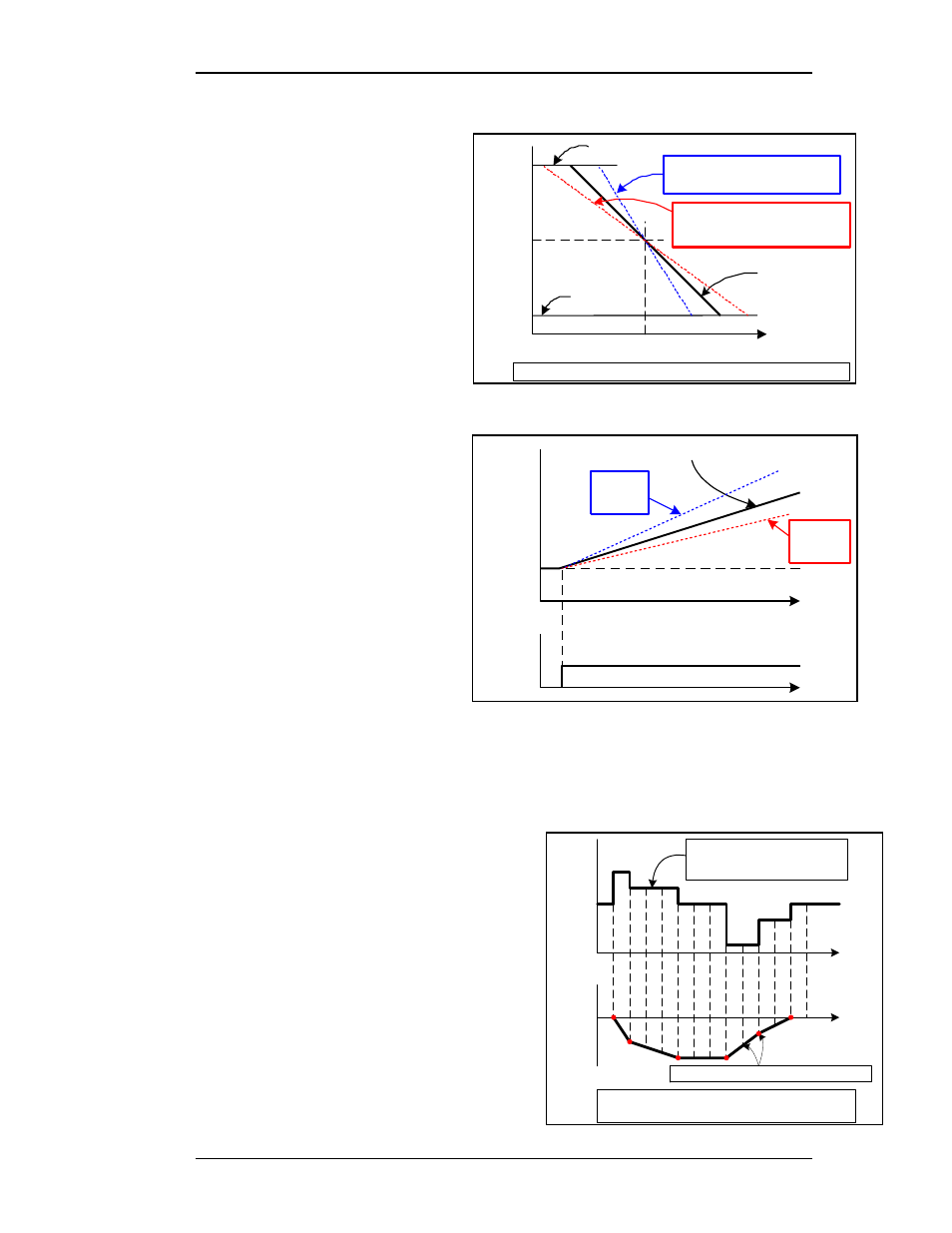
Integral response to constant error
Time
Time
Error
larger
Integral
value
smaller
Integral
value
C
o
n
tr
o
lle
r
o
u
tp
u
t
(%
)
Error (%)
0
(+)
(-)
C
o
n
tr
o
lle
r
o
u
tp
u
t
(%)
100%
0%
50%
Each error value produces a unique controller output value
Saturation
Saturation
Proportional
response
a higher Proportional value
Increases output response to a step
change in error
a lower Proportional value
Decreases output response to a step
Change in error
100%
0%
50%
Derivative response to changes
in the rate of deceleration or the
rate of acceleration.
Time
Time
E
rr
o
r
0
(+)
(-)
The error is sampled at regular intervals
C
o
n
tr
o
lle
r
o
u
tp
u
t
(%
)
When the "Rate of change" changes (red dot) the
Derivative's impact on controller output changes.
3.5 Proportional (required)
The proportional term is one
of the interrelated PID terms
that determine how well a
DPG controller governs the
engine’s speed. A speed
change creates a speed error
(the difference between the
target speed and the actual
speed.) The proportional gain
controls the size of the
controller output response to
a step change in the speed
error.
3.6 Integral (required)
The integral term is one of
the interrelated PID terms
that determine how well a
DPG controller governs the
engine’s speed. The integral
term acts to drive speed error
to zero. In a proportional only
control with constant load,
there will be a constant
speed error that inversely
relates to the proportional
gain of the system. The
integral term is key to
isochronous speed control.
This term eliminates the
difference between the programmed set speed and the actual speed. The integral gain
changes the time it takes to drive the error to zero.
Note: Integral is needed to eliminate speed offsets due to proportional gain and should
never be left at zero.
3.7 Derivative (required)
The derivative term is one of the
interrelated PID terms that determine
how well a DPG controller governs the
engine’s speed. The derivative
responds to the rate of change in the
speed error. This parameter is primarily
used to dampen very rapid oscillations
resulting from large speed changes. The
derivative responds to engine
acceleration or deceleration. If the
engine speed approaches the target
speed at a fast rate, the derivative acts
to minimize or eliminate overshoot. A
zero value is allowed but systems
typically require some derivative gain to
improve overall engine speed control.