Use mags, Internal / external mags, Result – Moog Crossbow GNAV540 User Manual
Page 89: Hard and soft iron values, Field name, Field id, Format, Scaling, Units, Table 59 internal external mags bit
G
nual
7430‐0808‐01 Rev. B
Page 89
NAV540 User Ma
Algorithm Aspect
Bits
Values
Use Mags
1
0: Do not use mags to stabilize he
open loop or be stabilized by GPS
ading (heading will run
track)
1: Use mags to stabilize heading
Use GPS
2
0: Do not use GPS to stabilize the system,
1: Use GPS when available
Stationary Yaw Lock
3
0: Do not lock yaw when GPS speed is nea
m/s)
r zero (<0.75
1: Lock yaw when GPS speed is near zero
Restart on Over‐range
4
0: Do not restart the system after a sensor over
‐range,
1: restart the system after a sensor over‐range
Dynamic Motion
5
0: vehicle is static, force high gain corrections
hicle is dynamic, use nominal corrections
1: ve
Reserved
6
N/A
Internal / External Mags
7
0: use the internal magnetometer
1: use the external magnetometer
NOTE: whether or not the magnetometer is used to
t in the Use Mags bit of the User
.
update the heading is se
Behavior configuration
Internal / External GPS
8
0: use the internal GPS
1: use the external GPS
Note: whether or not the GPS input is used in the
ithm is set in the
algor
confi
Use GPS bit of the User Behavior
guration
Reserved
9:15
N/A
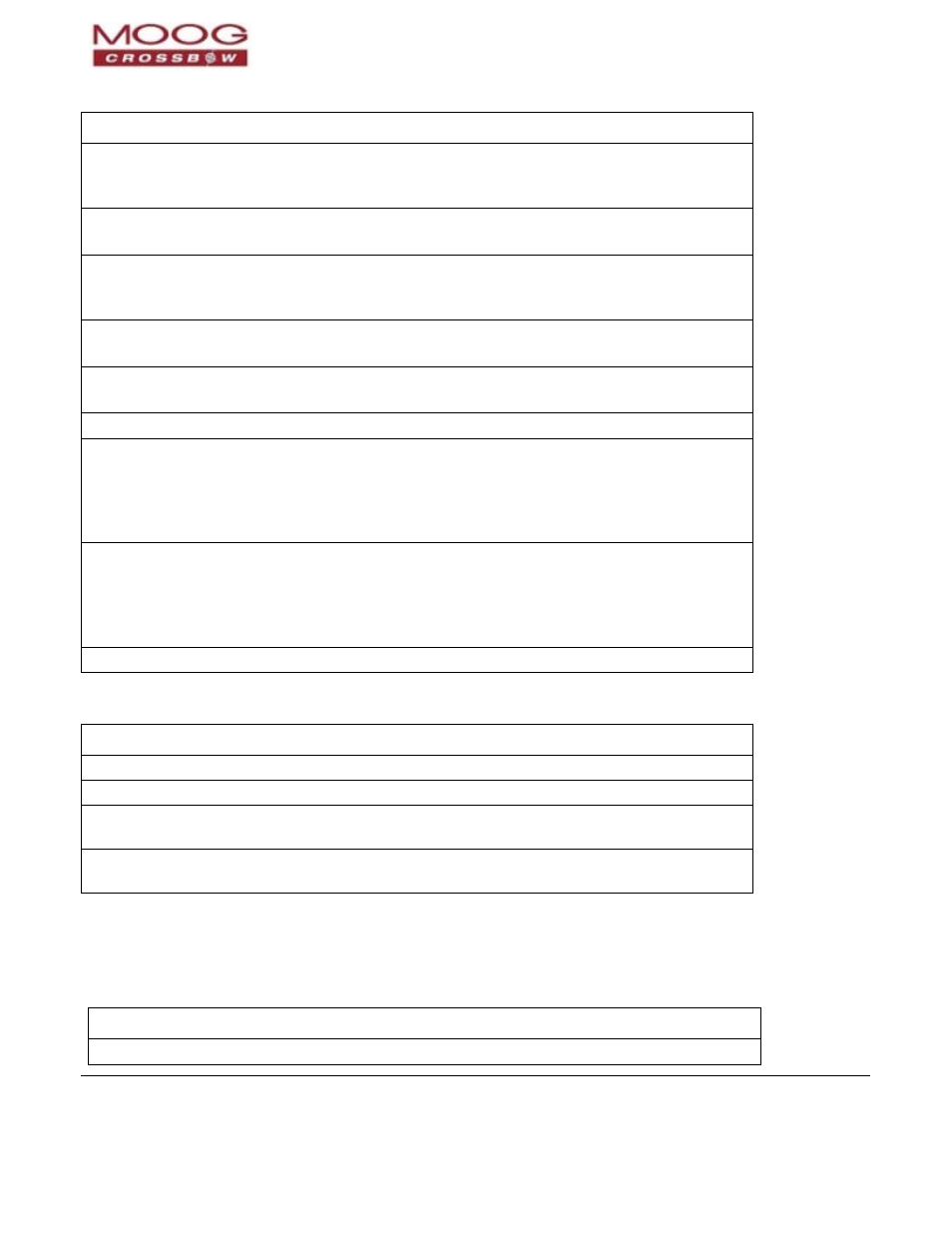
The following table clarifies the relationship of the Use Mags bit and the Internal / External Mags bit
Table 59 Internal External Mags Bit
Use Mags
Internal / External Mags Result
0
0
The magnetometer is not used
0
1
The magnetometer is not used
1
0
The heading is updated with the internal
magnetometer
1
1
The heading is updated with the external
magnetometer
Hard and Soft Iron Values
These fields allow access to hard iron bias and soft iron scale ratio values for magnetometer alignment. The
calibration values for the internal magnetometer:
Table 60 Internal Magnetometer Calibration Values
Field Name
Field ID
Format
Scaling
Units
X Hard Iron Bias
0x0009
I2
2/2^16
Gauss