Port description, Escription, Main controller – DJI WooKong-M User Manual
Page 23: Power management unit
©2013-2014 DJI Innovations. All Rights Reserved.
23 |
Port Description
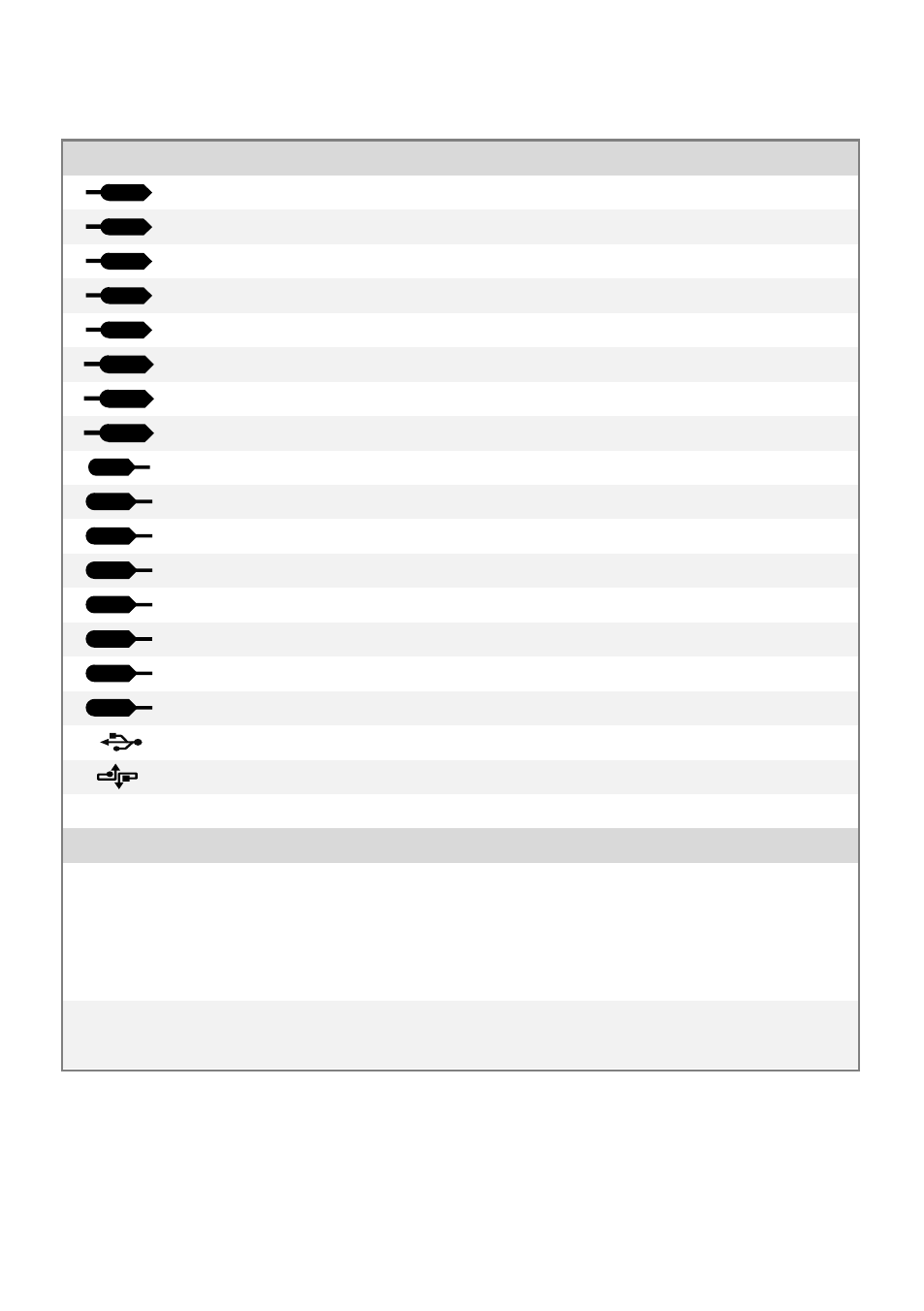
Please remember the function of each port, which may help you to use the autopilot system efficiently.
Main Controller
A
For roll control (left/right)
E
For pitch control (front/back)
T
For throttle control
Or to gimbal roll servo
R
For rudder control
Or to gimbal pitch servo
U
For Control Mode Switch
X1
For voltage monitor (Connect with PMU V-SEN port)
X2
For D-Bus (S-Bus/S-Bus2 compatible)
Or for gain tuning
Or for IOC switch
X3
For gimbal pitch control
Or for gain tuning
Or for switch go-home
M6
To #6 rotor
M5
To #5 rotor
M4
To #4 rotor
M3
To #3 rotor
M2
To #2 rotor
M1
To #1 rotor
F2
To gimbal pitch servo
Or to #8 rotor
F1
To gimbal roll servo
Or to #7 rotor
Micro-B USB port: PC connection for configuration and firmware upgrades.
CAN-Bus port: MC uses CAN-Bus to power and communicate with other WKM modules.
(In three-pin ports, pins near the nicks are signal pins.)
Power Management Unit
V-SEN
For monitoring battery voltage and supplying power to receiver and other electronic devices.
(Connect with MC X1 port)
Orange wire (signal wire) output: 0V ~ + 3.3V
Red wire (power wire) output: 3A@5V
PW
For supplying power to WKM system.
Output: Max 2A@6V