Rockwell Automation 2093-AMxx Kinetix 2000 Drive Systems Design Guide User Manual
Page 11
Rockwell Automation Publication GMC-RM006A-EN-P - September 2011
11
Kinetix 2000 Drive Systems
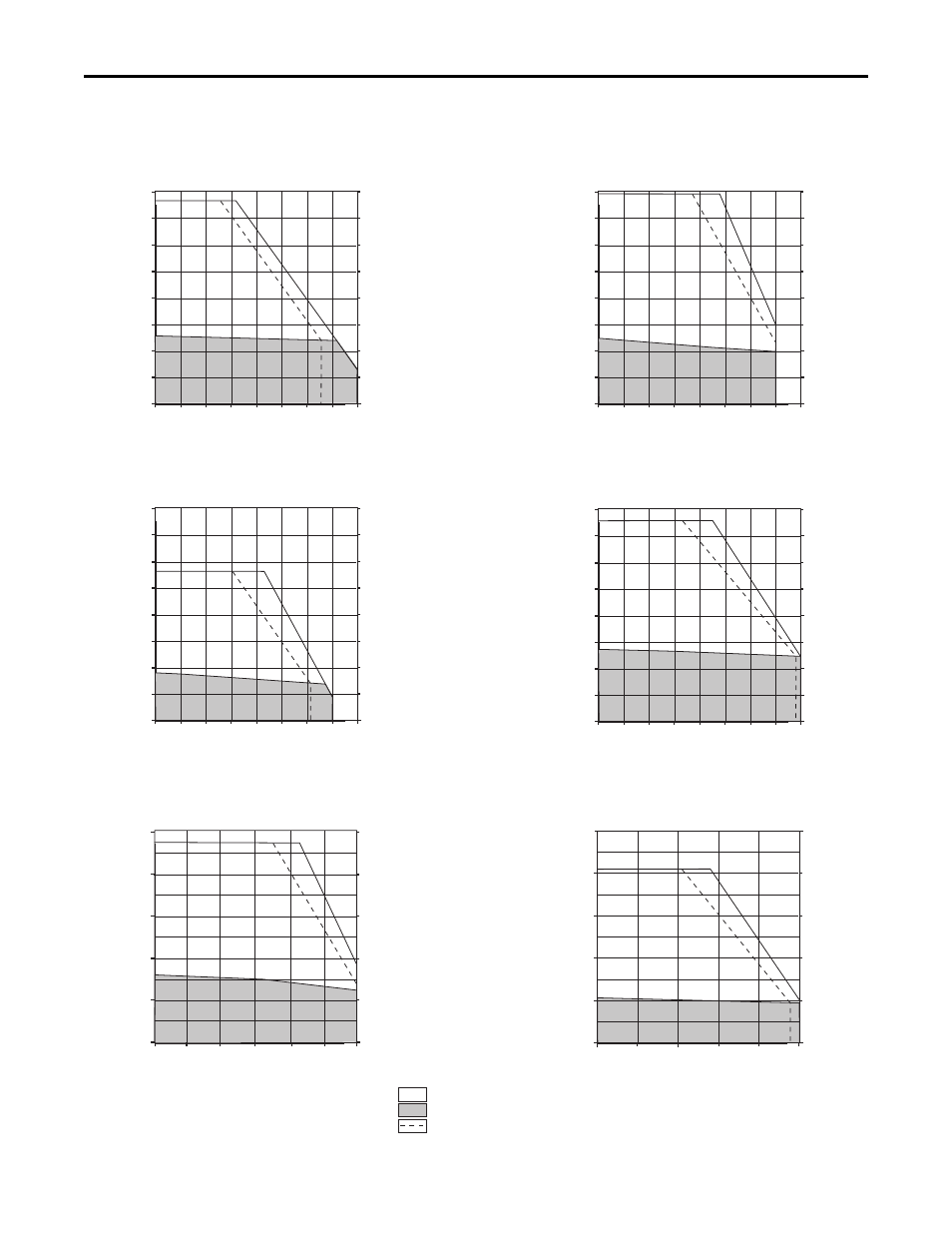
Kinetix 2000 Drives with MP-Series Low Inertia Motor Curves
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2000
4000
6000
8000
0
2093-AMP1 and MPL-A1510V
0.800
0.700
0.600
0.500
0.400
0.300
0.200
0.100
0
7.08
6.19
5.31
4.42
3.54
2.65
1.77
0.88
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2000
4000
6000
8000
0
2093-AMP2 and MPL-A1520U
1.600
1.400
1.200
1.000
0.800
0.600
0.400
0.200
0
14.1
12.4
10.6
8.85
7.08
5.31
3.54
1.77
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2000
4000
6000
8000
0
2093-AMP5 and MPL-A1530U
4.00
3.50
3.00
2.50
2.00
1.50
1.00
0.50
0
35.4
30.9
26.5
22.1
17.7
13.3
8.84
4.42
0
Torque
(N•m)
Torque
(lb•in)
Speed (rpm)
2000
4000
6000
8000
0
2093-AMP5 and MPL-A210V
1.600
1.400
1.200
1.000
0.800
0.600
0.400
0.200
0
14.1
12.4
10.6
8.85
7.08
5.31
3.54
1.77
0
Torque
(N•m)
Torque
(lb•in)
0
0
1.0
2.0
3.0
5.0
4.0
8.85
17.7
26.5
35.4
44.2
2093-AM01 and MPL-A220T
Speed (rpm)
1000 2000
3000
4000
0
5000 6000
Torque
(N•m)
Torque
(lb•in)
2093-AM02 and MPL-A230P
0
0
2.0
4.0
6.0
35.4
53.1
70.8
8.0
88.5
Speed (rpm)
0
3000
5000
4000
1000
2000
10.0
1.77
= Intermittent operating region (three-phase input)
= Continuous operating region
= Drive operation (single-phase input)