Disable the safe torque-off feature, Disable the safe, Torque-off feature – Rockwell Automation Logix5000 Control System: Connect Kinetix 350 Drives over an EtherNet/IP Network Quick Start User Manual
Page 18
18
Rockwell Automation Publication IASIMP-QS032A-EN-P - March 2012
Chapter 1 Prepare the Kinetix 350 Drive Hardware
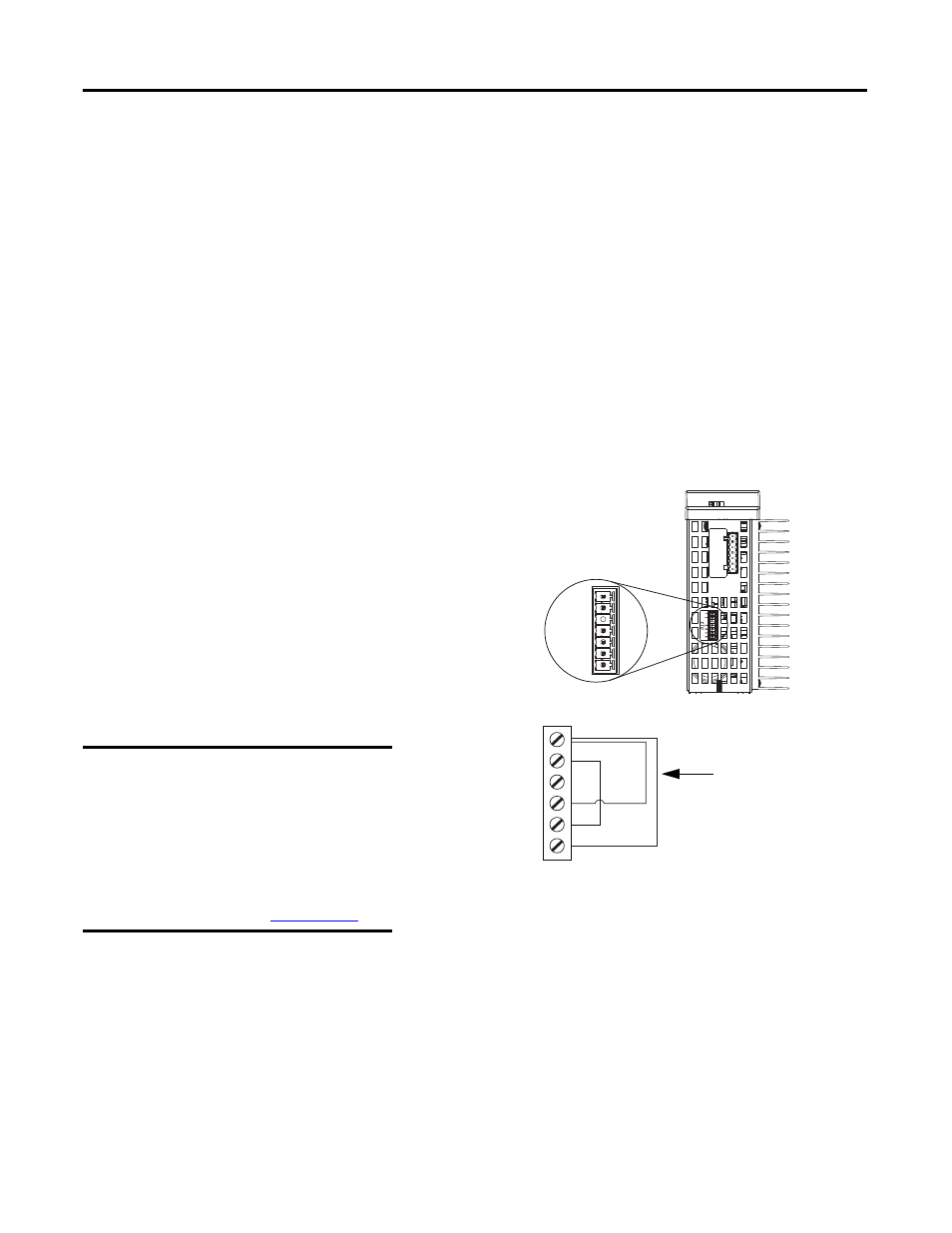
Disable the Safe Torque-off Feature
The safe torque-off feature is used in applications used in safety conditions. This feature safely
removes power from the gate firing circuits of the drives output power devices (IGBTs). The
feature is enabled by default when the Kinetix 350 drive ships from the factory.
If your application, for example, the one used in this quick start, does not require the use of safety
options, you disable the safe torque-off feature. You use jumper wires, as shown, to disable the
safe torque-off feature. The tasks in this quick start are not completed in an environment that
includes safety conditions. You can disable the safe torque-off feature.
Complete these steps to disable the safe torque-off feature.
1.
Remove the STO connector from
the drive.
2.
Install STO Motion-allowed
jumpers at the termination points
as shown.
3.
Insert the STO connector into the
bottom of the drive.
IMPORTANT
For more information about
using the safe torque-off
feature in an environment
that includes safety
conditions, see the Kinetix
350 Single-axis EtherNet/IP
Servo Drive User Manual,
publication
1 2 3 4 5 6
ST
O
Safe Torque-off
(STO) Connector
Bottom View of Drive
STO-1
STO-2
STO-3
STO-4
STO-5
STO-6
Motion-allowed
Jumpers