Pr - 1.10] velocity regulator i-gain mode – Rockwell Automation 2092-DAx Ultra1500 Host Commands for Serial Communication Reference Manual User Manual
Page 35
Publication 2092-RM001A-EN-P — March 2005
Command Reference
2-23
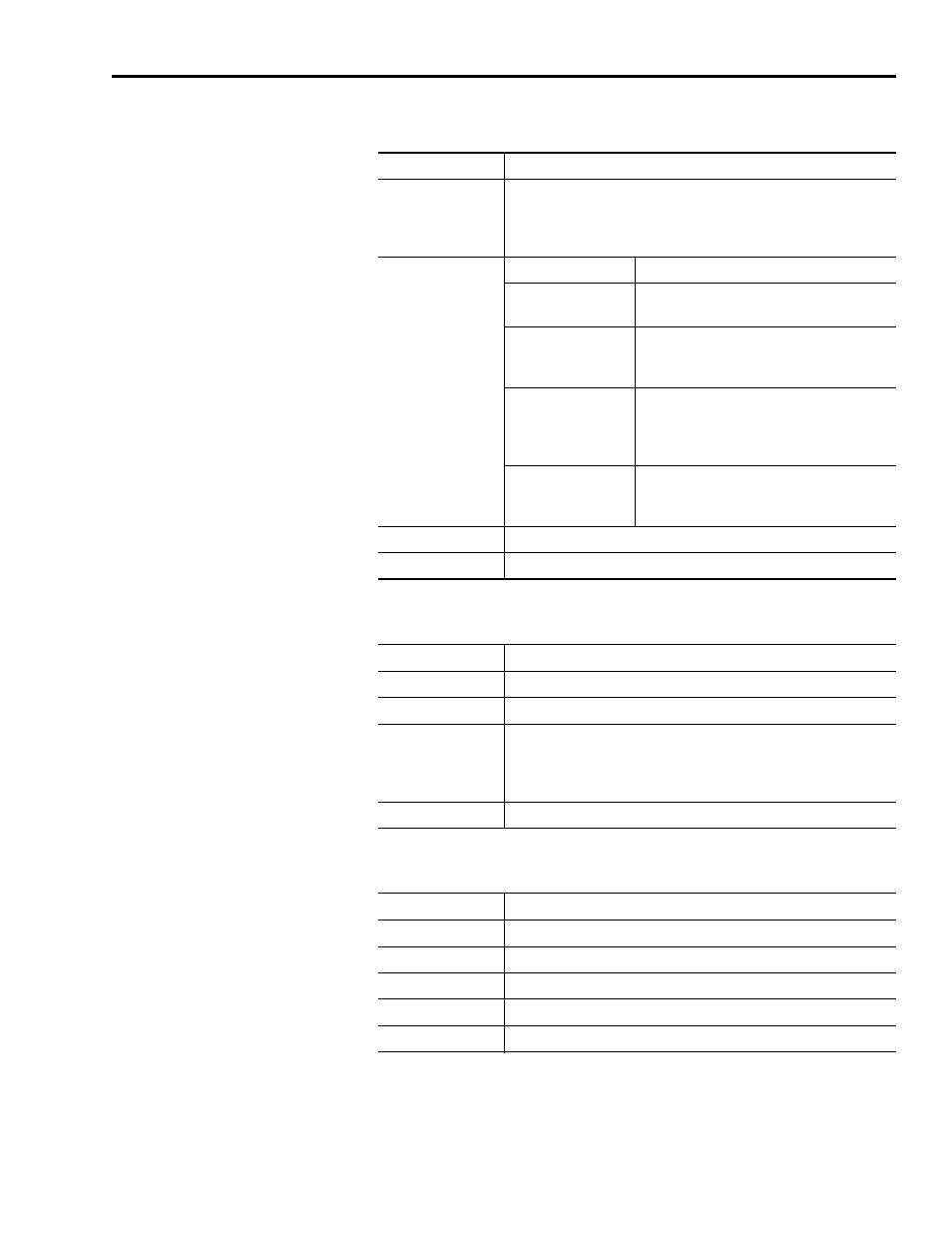
[Pr – 1.10] Velocity Regulator I-Gain Mode
[Pr – 1.11] Velocity Regulator Integrator Hold Threshold
[Pr – 1.12] Position Regulator High Error Output Offset
Ultraware Name:
Main Velocity Regulator Gains:Integrator Mode
Description:
During transient response, speed response overshoot can be
suppressed by speed controller change from proportion integration
(PI) controller into proportion (P) controller. It reduces position
completion time during position control.
Range:
Value Description
0x0
Always On - Do not use P/PI Mode
Conversion.
0x1
High Current Disable - If Current Command
exceeds value in [Pr-1.11], Speed controller
is changed from PI Controller to P Controller.
0x2
Velocity Command Disable - If Velocity
Command exceeds value in [Pr-1.11], Speed
controller is changed from PI Controller to P
Controller.
0x3
Position Error Disable - If Position Error
exceeds value in [Pr-1.11], Speed controller
is changed from PI Controller to P Controller.
Default:
0
Operating Mode:
Follower, Analog Velocity, Preset
Ultraware Name:
Main Velocity Regulator Gains: Integrator Hold Threshold
Range:
0 to 3000
Default:
100
Units:
If [Pr-1.10] = 0, disabled
If [Pr-1.10] = 1, units are % of rated continuous current
If [Pr-1.10] = 2, units are: rotary = rpm. linear = mm/sec
If [Pr-1.10] = 3, units are Counts
Operating Mode:
Follower, Analog Velocity, Preset
Ultraware Name:
Main Position Regulator Gains: High Error Output Offset
Operating Mode:
All
Range:
0 to 450
Default:
0
Units:
rotary: rpm. linear: mm/sec
Operating Mode:
All