Rockwell Automation 842E EtherNet/IP Absolute Encoder User Manual User Manual
Page 22
14
Rockwell Automation Publication 842E-UM001A-EN-P May 2012
Chapter 3
EtherNet/IP overview
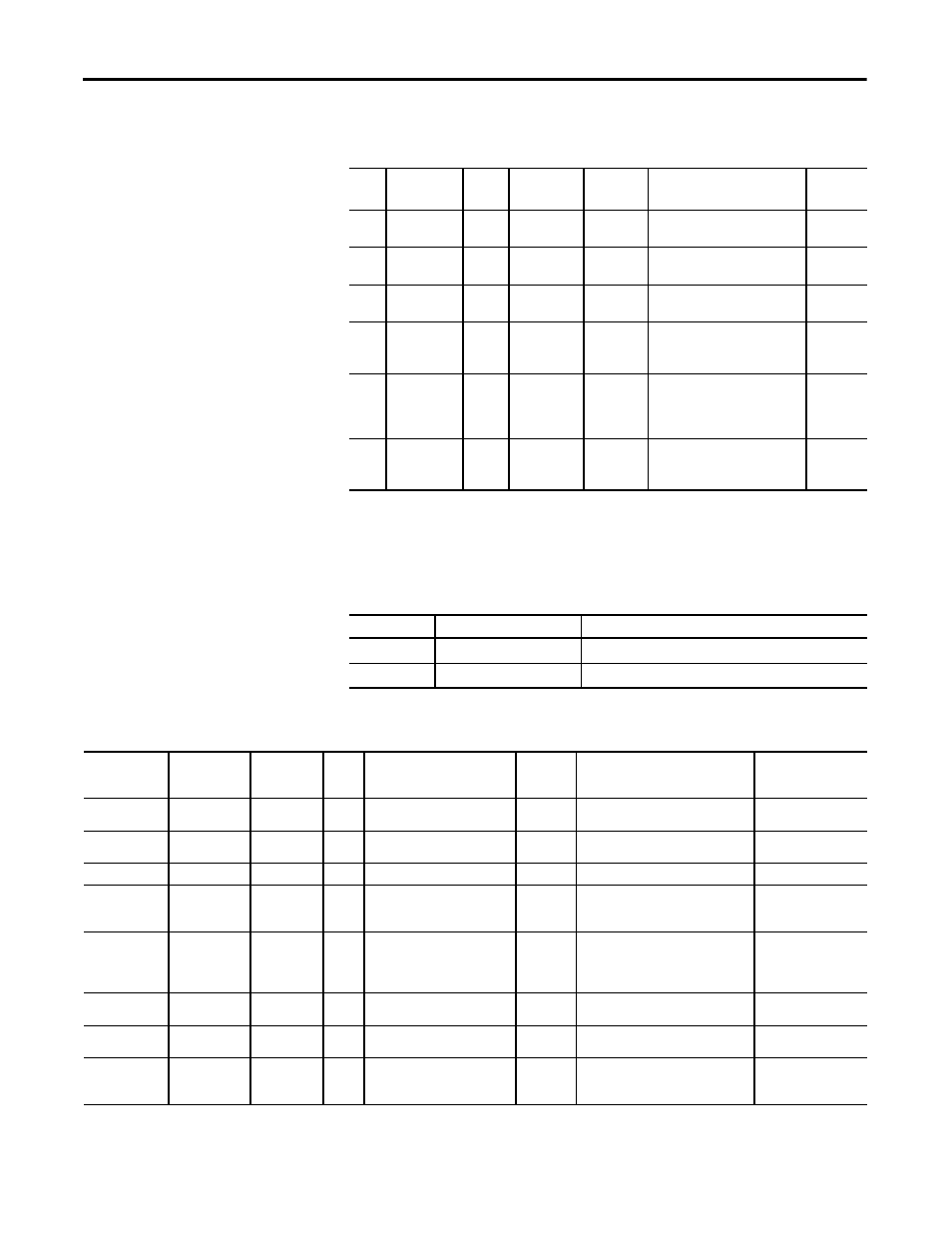
Class attributes of the position sensor object
(1) Nonvolatile
Instance Services of the position sensor object are automatically populated in the
explicit message instruction configuration
Instance services of the position sensor object
1Instance attributes of the position sensor object
Num
(dec)
Required/
optional
Access
rule
Name
Data type Description
Default
1
Required
(implemented)
Get
Revision
INT
Object revision no
0x00 02
2
Implemented
Get
Max instance
INT
Max. instance number of an object
in this class
0x00 01
3
Implemented
Get
Number of
instances
INT
Number of object instances in this
class
0x00 01
6
Implemented
Get
Maximum ID
number class
attributes
INT
Highest implemented class ID
0x00 64
7
Implemented
Get
Maximum ID
number
instance
attributes
INT
Highest implemented instance
attribute ID
0x00 7A
100
Get
NV
(1)
Encoder
firmware
version
ARRAY
of bytes
aa.bb: major revision
minor revision
dd.mm.yy: day.month.year
842eaa.bb
dd.mm.yy
Instance
Service name
Description
0x0E
Get_Attribute_Single
Returns value of attribute
0x10
Set_Attribute_Single
Sets value of attribute
Attribute ID
(dec)
Attribute ID
(hex)
Access
rule
(1)
NV /
V
(2)
Name
Data type Description
Min. / max
(default)
1
1
Get
V
Number of attributes
INT
Number of supported attributes in this
class
0x0039
2
2
Get
V
Attribute list
ARRAY
of byte
List of supported attributes
–
10
A
Get
V
Position value signed
DINT
Current position value (32 Bit)
none
11
B
Get
NV
Position sensor type
(see following table, encoder ID)
INT
Device Type
0x01: Single-turn absolute encoder
0x02: Multi-turn absolute encoder
Min 0x00 01
Max 0x00 02
(0x00 02)
12
C
Set
NV
Direction counting toggle, code
sequence (CS)
BOOL
Definition of direction of incrementing
counts (10)
0: CW
1:CCW
(0: CW)
13
D
Set
NV
Commissioning diagnostic control
(encoder position test)
BOOL
ON: 1 Encoder diagnostics possible
OFF: 0 No diagnostics implemented
(OFF: 0)
14
E
Set
NV
Scaling function control (SFC)
BOOL
ON: 1 calc. value (from 16+42)
OFF: 0 phys. resolution [steps]
(OFF: 0)
15
F
Set
NV
Position format
ENG
UNIT
Format of position value
(e.g., arcsec or steps)
Engineering unit: 0x1001 (counts)
(0x1001)