7 quick start reference, 1 quick start - external torque mode, 7quick start reference – Lenze S94P01B2 User Manual
Page 62: Reference
S94P01B2
60
Reference
7
Quick Start Reference
This section provides instructions for External Control, Minimum Connections and
Parameter Settings to quickly setup a PositionServo drive for External Torque,
Velocity or Positioning Modes. The sections are NOT a substitute for reading the entire
PositionServo User Manual. Observe all safety notices in this manual.
7.1
Quick Start - External Torque Mode
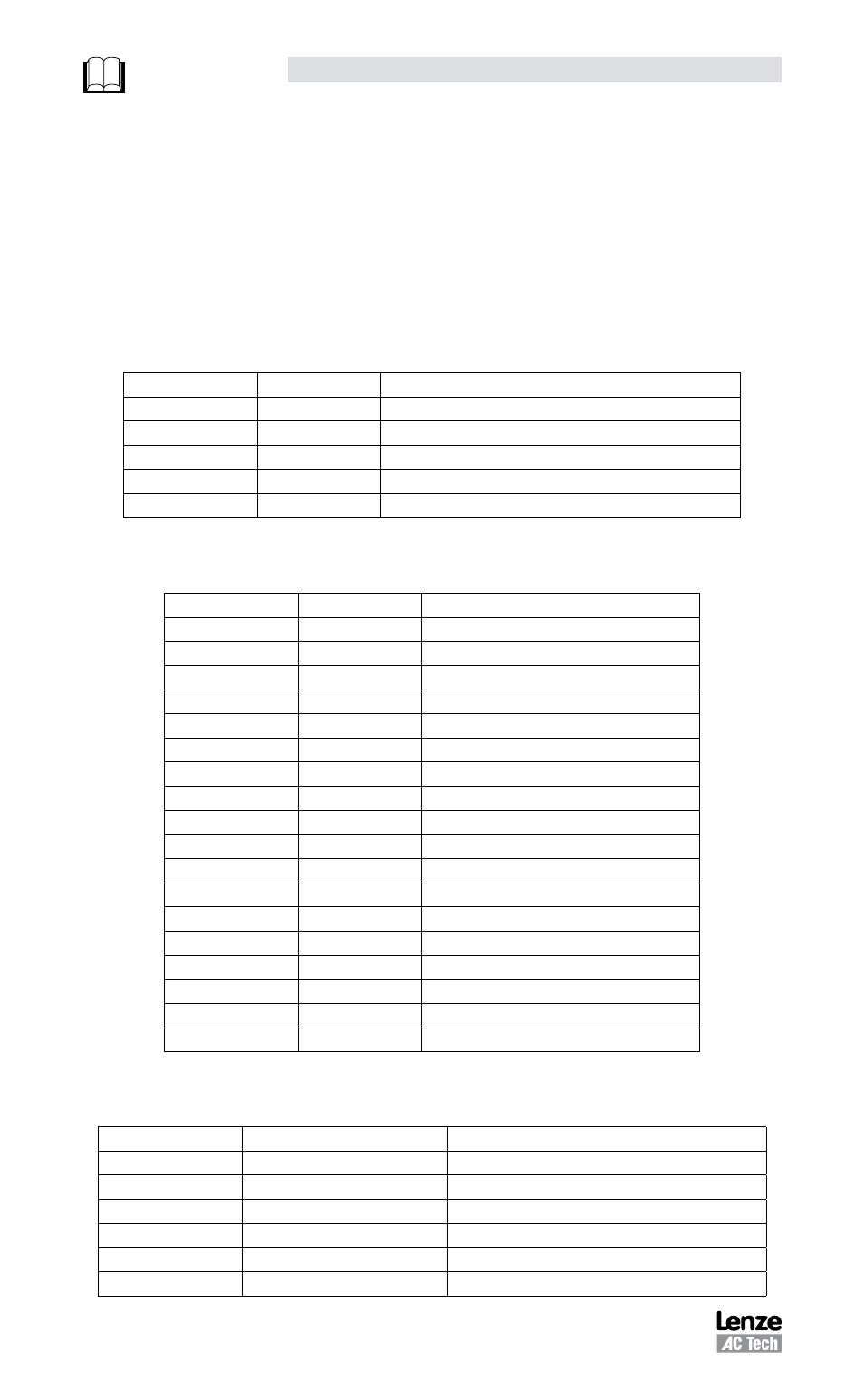
Mandatory Signals:
These signals are required in order to achieve motion from the motor.
Connector - Pin
Input Name
Description
P3-22
ACOM
Analog Common Reference from Controller
P3-24
AIN1+
Analog Torque Reference from Controller – Positive
P3-25
AIN1-
Analog Torque Reference from Controller – Negative
P3-26
IN_A_COM
Common Input for Enable Input
P3-29
IN_A3
Enable Input to Controller or switch
Optional Signals:
These signals may be required dependant on the control system being implemented.
Connector - Pin
Input Name
Description
P3-6
+5V
+5V Output for Enable Input (If required)
P3-7
A+
Buffered Encoder Output
P3-8
A-
Buffered Encoder Output
P3-9
B+
Buffered Encoder Output
P3-10
B-
Buffered Encoder Output
P3-11
Z+
Buffered Encoder Output
P3-12
Z-
Buffered Encoder Output
P3-23
AO
Analog Output
P3-41
RDY+
Ready output Collector
P3-42
RDY-
Ready output Emitter
P3-43
OUT1-C
Programmable output #1 Collector
P3-44
OUT1-E
Programmable output #1 Emitter
P3-45
OUT2-C
Programmable output #2 Collector
P3-46
OUT2-E
Programmable output #1 Emitter
P3-47
OUT3-C
Programmable output #3 Collector
P3-48
OUT3-E
Programmable output #1 Emitter
P3-49
OUT4-C
Programmable output #4 Collector
P3-50
OUT4-E
Programmable output #1 Emitter
Mandatory Parameter Settings:
These Parameters are required to be set prior to running the drive
Folder / Sub-Folder
Parameter Name
Description
Parameters
Drive Mode
Set to [Torque]
Reference
Set to [External]
IO / Analog IO
Analog Input (Current Scale)
Set to required current per 1V input from controller
Analog Input Dead band
Set zero torque Dead band in mV
Analog Input Offset
Set Analog Offset for Torque Reference
IO / Digital IO
Enable Switch Function
Set to [Run]