2 tuning the drive in position mode, Operation – Lenze S94P01B2 User Manual
Page 56
S94P01B2
54
Operation
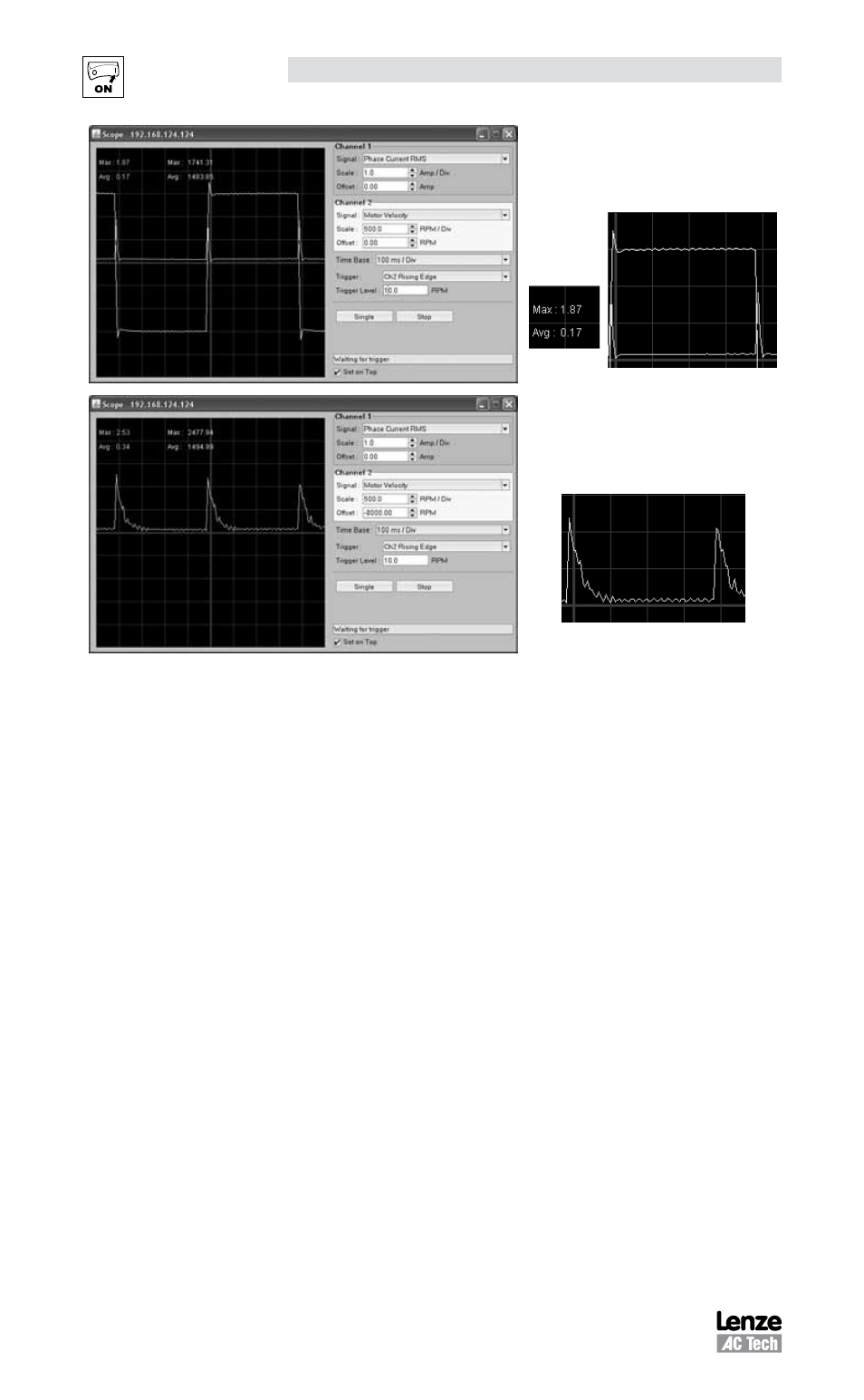
Good Current Trace
Uniform current pulses during accel/
deceleration and stable current during steady
state velocity.
Instability in Drive Output Current
(Note: Channel 2 trace has been removed for
clarity).
8)
End Velocity Tuning
Remove the Enable Input from input A3 (disable the drive). In MotionView, click on
the [Indexer] folder for the drive. Click [Reset] on the program toolbar. If the drive is to
be run in just velocity mode then tuning is now complete. If the drive is to be used in
Positioning mode continue with ‘Tuning the Drive in Position Mode’, section 6.6.2.
6.6.2 Tuning the Drive in Position Mode
Velocity Tuning should be carried out prior to the tuning of the position loop. Refer to the
Velocity Tuning section, 6.6.1.
1)
Parameter Set up
In MotionView, open the [Limits] folder and then the [Position Limits] sub-folder. Set the
[Position Error] and [Max Error Time] parameters to their maximum values to effectively
disable the position error trip while tuning takes place. Ensure the system is safe to
operate in this manner.
Position Error
= 32767
Max Error Time = 8000
The Drive Mode, Reference and Enable Switch Function parameters are automatically
configured by the velocity tuning program. They do not require setting at this stage.