Lenze 9228E User Manual
Page 27
25
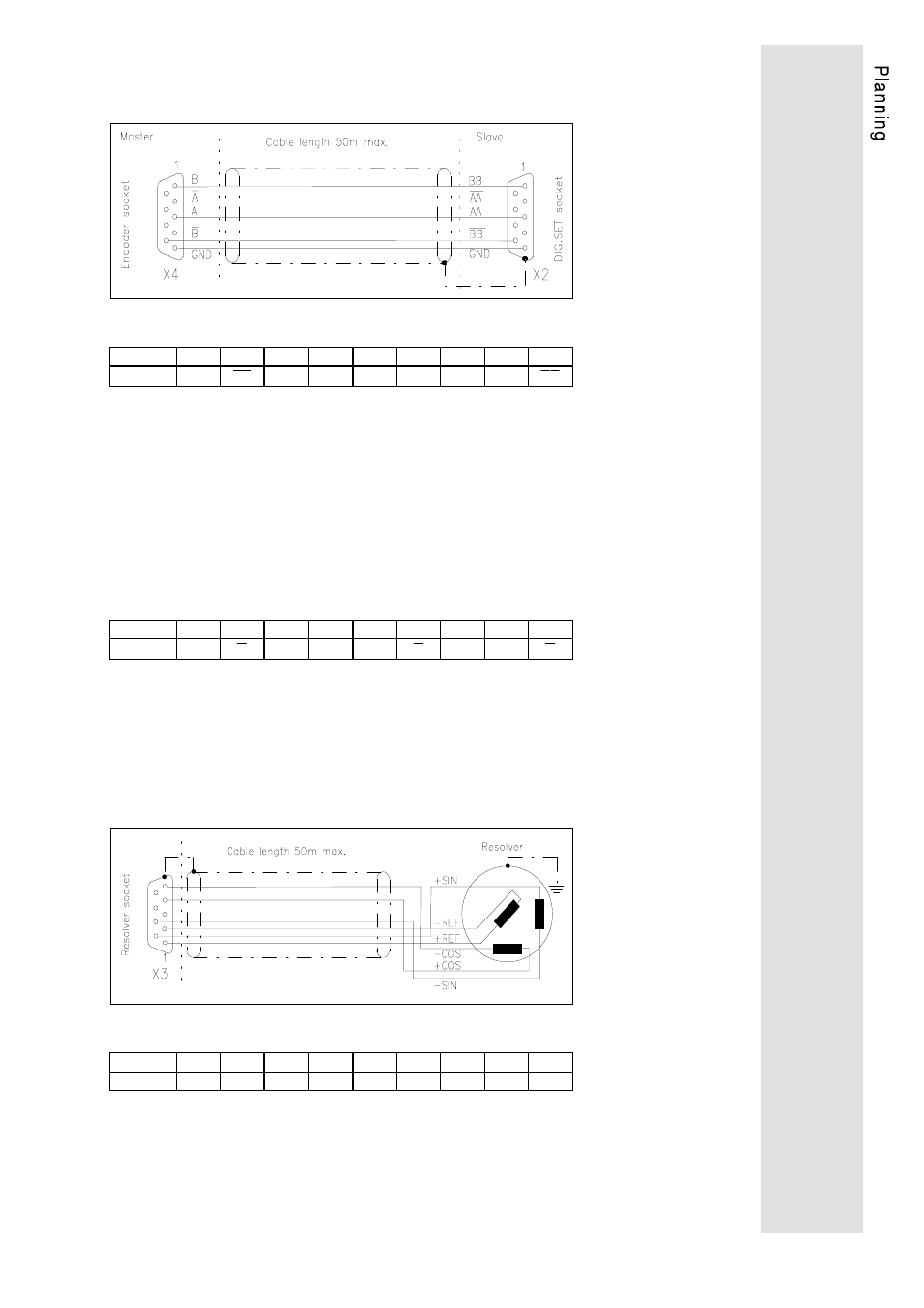
b) Master frequency input by encoder output signal of the
master drive
Pin assignment X2 male Dig.Set
Pin
1
2
3
4
5
6
7
8
9
Signal
BB
AA
AA
+ 5V
GND
--
--
--
B B
Encoder simulation
The encoder socket (X4) is used as an output for the encoder
simulation. Two TTL complementary signals (V
high
_ 2,5V, V
low
_
0,5V at I = 20mA) shifted by 90°C with 256, 512, 1024 or 2048
increments are generated per revolution (adjustable via C030). This
output is used for actual value feedback for closed-loop control
(positioning control) or as a set value for slaves (master/slave
operation). The current capacity is 20 mA per channel.
Pin assignment X4 encoder socket
Pin
1
2
3
4
5
6
7
8
9
Signal
B
A
A
+ 5V
GND
Z
Z
LC
B
Resolver
2-pole resolvers (V=10V,f=5kHz) are fitted as standard. The Lenze
servo motors are already equiped with the corresponding resolvers.
The resolver is connected by means of a 9-pole socket (X3). The
resolver supply cable and the resolver are monitored for open
circuit (fault indication Sd2).
Pin assignment X3 resolver female plug
Pin
1
2
3
4
5
6
7
8
9
Signal
+REF
-REF
GND
+COS
−
COS
+SIN
−
SIN
--
--