10 monitoring, 1 interruption of ethercat communication, Monitoring – Lenze E84DGFCT User Manual
Page 56: Interruption of ethercat communication, Communication manual 8400 motec ethercat
Communication manual 8400 motec EtherCAT®
Monitoring
Interruption of EtherCAT communication
56
L
EDS84DMOTECAT EN 2.1 - 11/2012
10
Monitoring
10.1
Interruption of EtherCAT communication
An interruption of the EtherCAT communication in the "Operational" state, e.g. due to
cable break of failure of the EtherCAT master, is detected by the slave.
The response to the communication interruption is controlled via the following
settings:
1. During the initialisation of the EtherCAT communication, the sync manager
watchdog monitoring time determined in the master is transferred to the slave.
If the slave does not receive any valid process data in the "Operational" state, the
process data are treated according to the setting in
. (The data sent last
by the master can be used or reset to zero.)
After the watchdog monitoring time has expired, the slave changes to the "Error
Safe-Operational" state (see
). LEDs RUN (green) and ERR (red) are activated
There is no response in the slave.
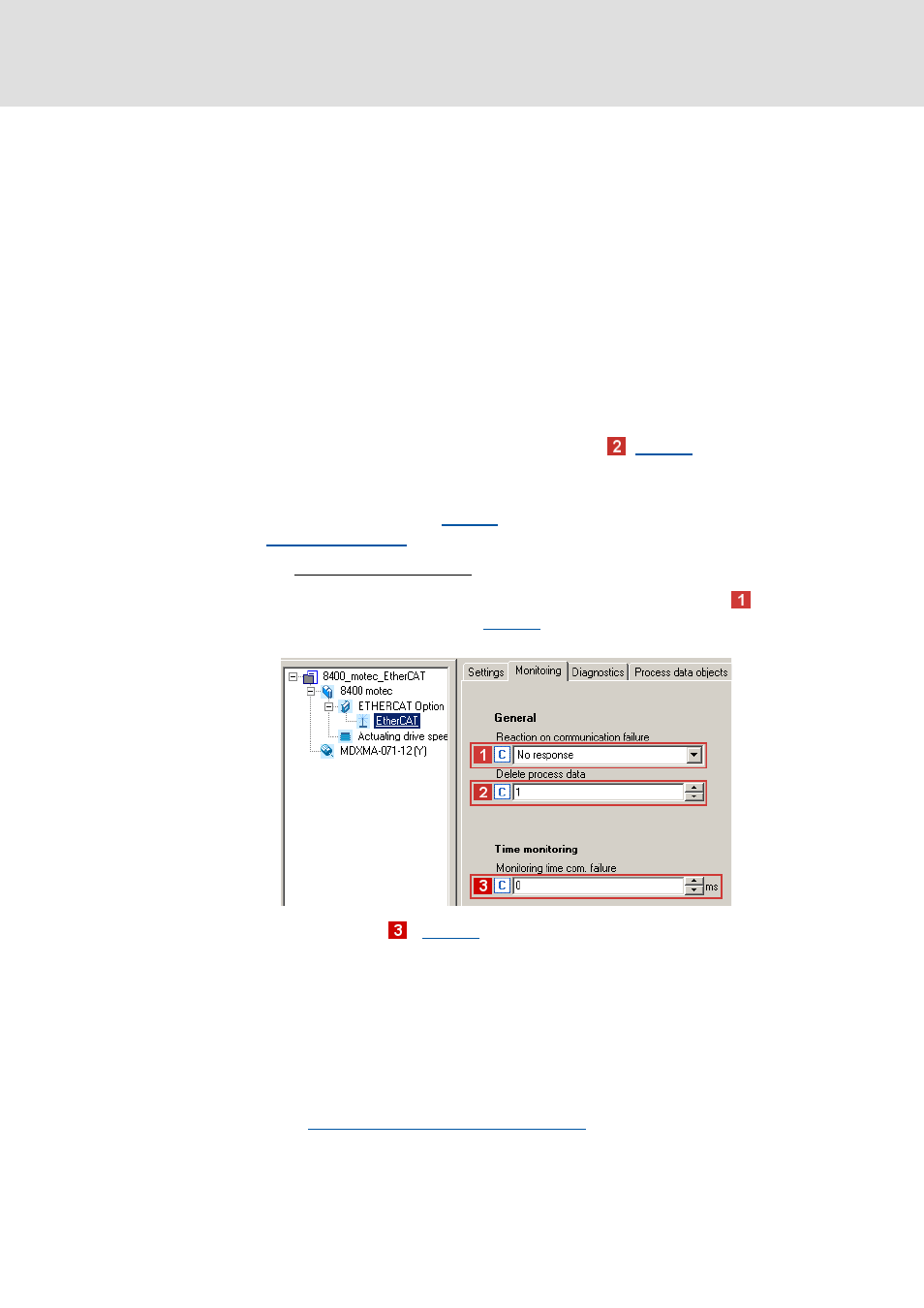
2. In order to trigger a response in the slave, you can set an additional
response
of the Inverter Drive 8400 motec (
) in the »Engineer« on the Monitoring
tab.
Set a response delay
) to delay execution of the response.
• A Lenze setting of "No response" deactivates this monitoring.
• Setting a response will activate the monitoring as long as a response time
< 65356 ms is set.
• A change in monitoring is effective immediately.
• The monitoring time expires as soon as communication in the "Operational"
state is interrupted.
After the monitoring time has elapsed, the set response is executed with the error
Operational status quit [0x01bc8131]
"
.