Powering up, Initializing the system, Powering up 3.7. initializing the system – ElmoMC Multi-Axis Motion Controller-Gold Maestro User Manual
Page 28
Gold Maestro Installation Guide
Installation
MAN-GOLD-MAESTRO-IG (Ver. 1.301)
28
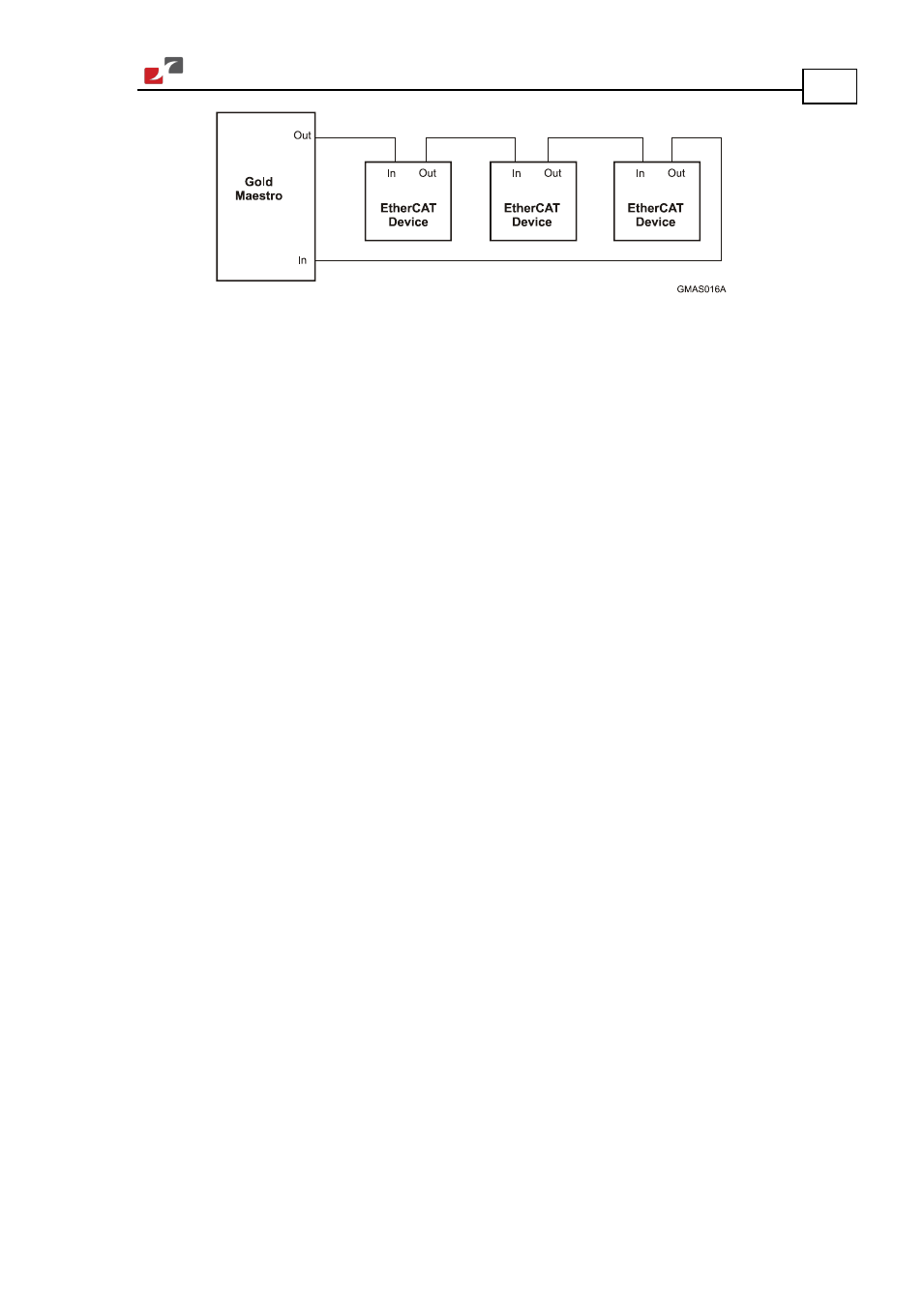
Figure 12: EtherCAT Network with Redundancy
EtherCAT with redundancy is an optional method of connection.
3.6. Powering Up
After the Gold Maestro has been mounted, check that the cables are intact. The Gold Maestro
is then ready to be powered up.
3.7. Initializing the System
After the Gold Maestro has been connected and mounted, the system must be set up and
initialized. The minimum system requirements for a setup are:
•
Gold Maestro (and power supply)
•
PC with the required Elmo software
•
At least one servo drive and motor
•
EtherCAT cables or a terminated CAN network
•
A servo drive connected through an EtherCAT cable or a CAN cable (the terminated
CAN network)
Users of SimplIQ servo drives:
Setting up the drives and motors is described in the Installation Guide for each servo drive and
in the Elmo Application Studio User Guide. Advanced features are described in the SimplIQ
Software Manual, Interlude API User Guide, SimplIQ Command Reference and CAN
Implementation Guide.
Users of Gold Line servo drives:
Setting up the drives and motors is described in the Gold Line Servo Drive Installation Guide
and Elmo Application Studio Users Guide. Advanced features are described in the Gold Line
Software Manual, Gold Line Command Reference and CAN Implementation Guide.