Campbell Scientific CS135 Lidar Ceilometer User Manual
Page 29
User Guide
21
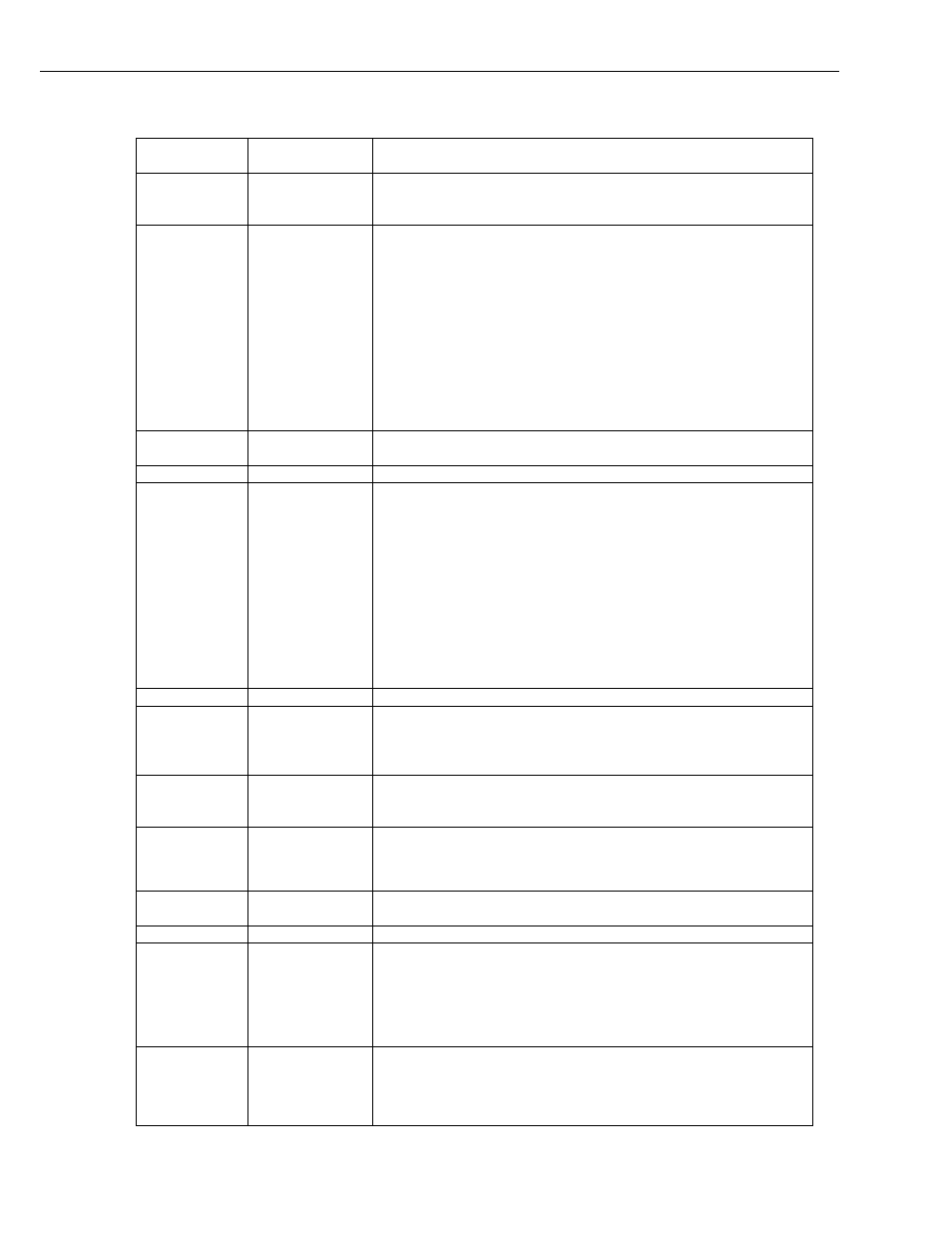
Table 5.1 Summary of the terminal mode commands available
Command Parameter/
Parameter block
Description
ALARMS
Angle Angle
is the threshold tilt angle of the sensor beyond which an alarm
will be flagged. The settable range is 0 to 90.0 degrees tilt and the
default is 45 degrees.
BS
Attenuated_SCAL
E
BS_Av_Time
Noise_Gate
Measurement_
Period
Attenuated_SCALE is the scalar for the attenuated backscatter, default
100%
BS-Av_Time is the back scatter average time in seconds (default 2.0).
Noise_Gate controls the noise threshold applied to backscatter.
Noise_Gate = -1000, all back scatter range is corrected.
Noise_Gate = 0.0-1000.0, standard deviation for noise threshold,
default 2.0. Only back scatter above this is range corrected.
Measurement_Period 0 or 2 to 600 (default 10). If set to 0 and the
CS135 is polled it will first take a measurement and then output the
message. If it is between 2 and 600 seconds then the CS135 will
continually update measurements and any poll command will output
the last measurement made.
CLOSE
No parameters
Closes the terminal interface to allow normal message output and saves
new settings to flash non-volatile storage.
DEFAULTS
No parameters
Loads factory defaults
HEATERS
Hood
Internal
Laser
Sets or reads heater settings as follows:-
Hood = 0, Hood blower and heater OFF
Hood = 1, Hood blower ON and heater OFF
Hood = 2, Hood blower ON and heater ON
Hood = 3, Hood blower and heater AUTO (default)
Internal = 0, Internal heater OFF
Internal = 1, Internal heater ON
Internal = 2, Internal heater AUTO (default)
Laser = 0, laser heater off
Laser = 1, laser heater on (default)
HELP
No parameters
Calls up a list of user commands with brief descriptions
HOFFSET
Height_offset Height_offset is the offset to be added or subtracted in the range -
1000m to +1000m or -3281ft to +3281ft. Positive values are added to
measured height and negative values are subtracted from measured
height. The default is 0.
ID
Sensor_ID
Reads or sets the sensor ID, a single ASCII character, 0-9, a - z or A - Z,
case sensitive. Default ID = 0. Note that if a CT25K message is to be
used lower case letters are not allowed.
LASER
Laser
Laser_Power
Laser = 0, Laser off after power up (user must switch laser on).
Laser = 1, Laser on after power up (default).
Laser_Power = 20%-100%, default 100%.
LASEROFF
No parameters
Instructs the CS135 to turn the laser off until either a power cycle or the
sensor is instructed to turn the laser back on.
LASERON
No parameters
Instructs the CS135 to try and turn the laser on
LOADOS
Module
Loads new operating system into modules as follows: -
Module =1, DSP
Module =2, TOP
Module =3, PSU
This command must be sent using the XMODEM protocol. Refer to
Section 5.1.7 for more information.
MCFG
Message_Interval
Message_ID_A
Message_ID_B
Message_ID_C
Set or read message configuration.
Message_Interval is the message interval in seconds, 2 - 600 seconds,
0 gives polled messages, default 10.