2 wait = linkcondition, Wait = linkcondition – Teledyne LeCroy PETrainer Scripting Language Reference Manual User Manual
Page 58
Teledyne LeCroy
PETrainer Scripting Language
53
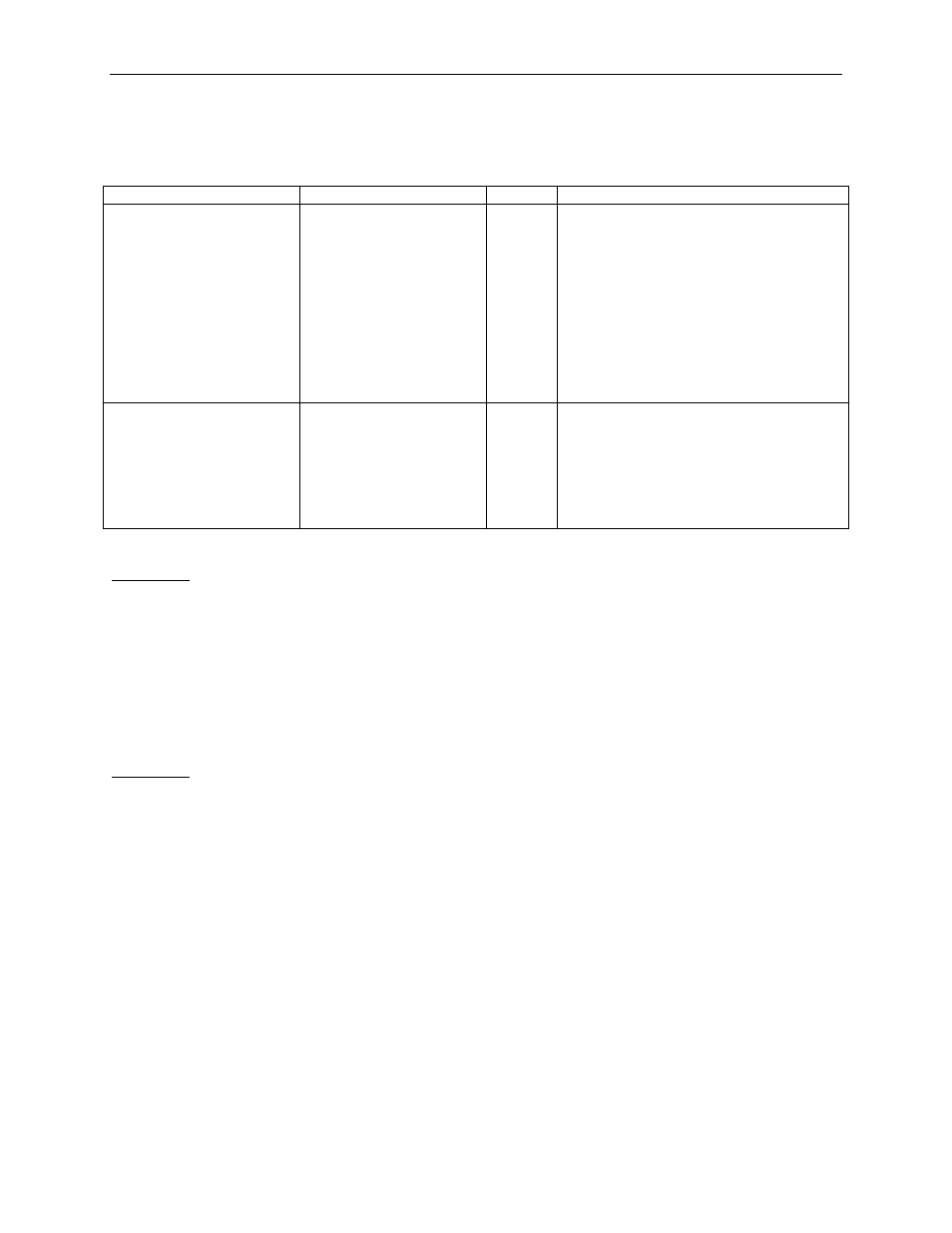
7.2 Wait = LinkCondition
Parameter
Values
Default Comment
Conditions
SKIP
IDLE
TS1
TS2
FTS
PATN
DLLP
TLP
COMMA
ElectrIdle
LinkAlive
The list of conditions for which to wait.
Note: Conditions IDLE, PATN,
ElectrIdle are only supported by ML
and EML Trainers.
Note: Condition LinkAlive waits for bus
to be at L0 state and it is supported
only by Z2 and Z3 Trainers
TrainingControl
(X,X,X,X)
Training control bits. The order of the
bits is as follows:
(HotReset, DisableLink, Loopback,
DisableScrambling)
Parameter supported only for
PETrainer™ ML and EML
Example 1:
This command waits for the COMMA symbol in incoming traffic.
The script execution continues when the COMMA symbol is received or after the 1024 ns timeout expires.
Wait = LinkCondition {
Conditions = ( COMMA )
Timeout = 1024
}
Example 2:
This command waits for a Training Sequence Ordered Set (TS1 or TS2) in incoming traffic with the
HotReset bit asserted in the TrainingControl bits.
The script execution also continues after the 1024 ns timeout expires.
Wait = LinkCondition {
Conditions = ( TS1, TS2 )
TrainingControl = ( 1, 0, 0, 0 )
Timeout = 1024
}