Server driver – ProSoft Technology MVI56E-MNETR User Manual
Page 114
MVI56E-MNETR ♦ ControlLogix Platform
Reference
Modbus TCP/IP Interface Module with Reduced Data Block
User Manual
Page 114 of 153
ProSoft Technology, Inc.
August 31, 2009
Server Driver
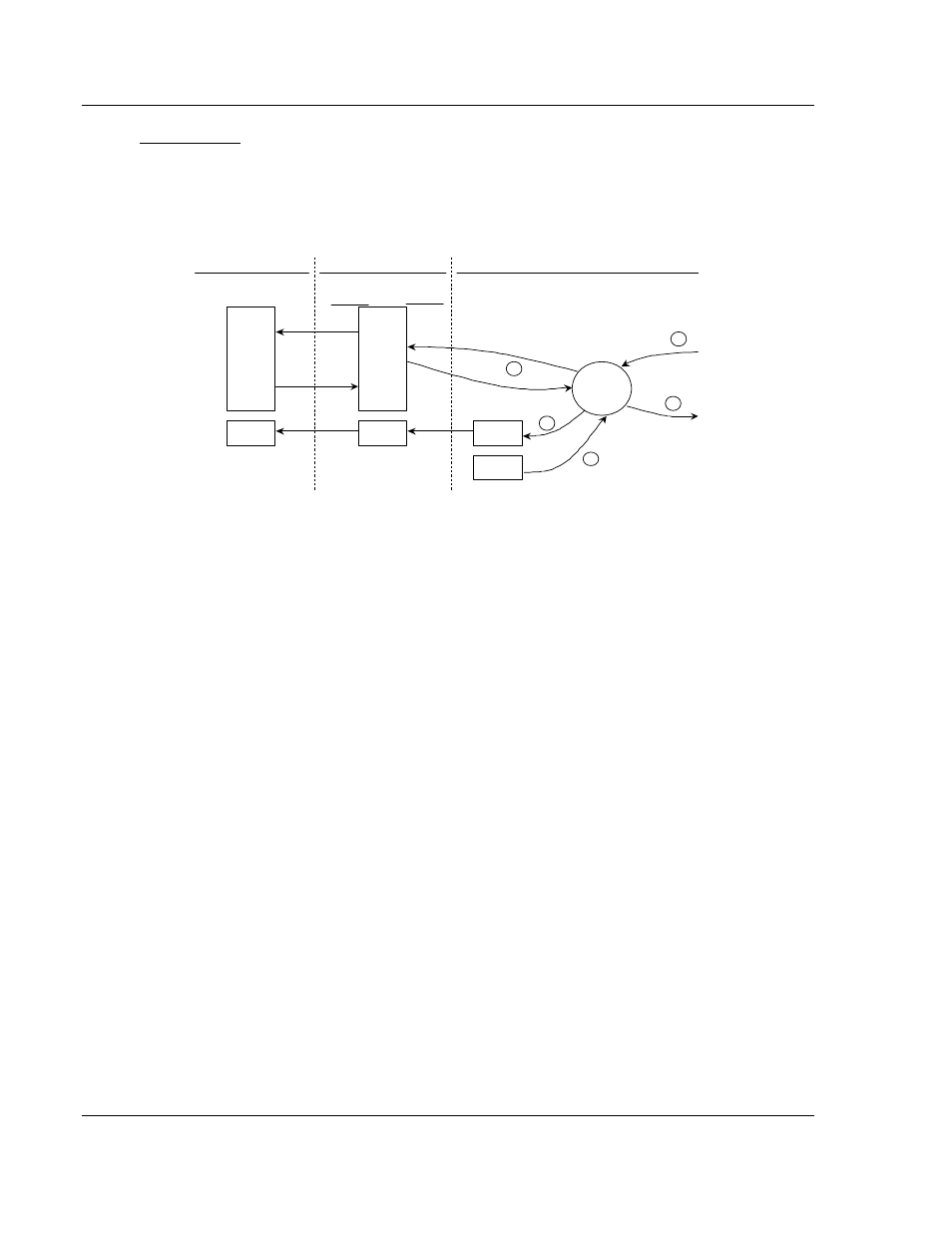
The Server Driver allows the MVI56E-MNETR module to respond to data read
and write commands issued by clients on the Modbus TCP/IP network. The
following illustration and associated table describe the flow of data into and out of
the module.
0
4999
40001
45000
Modbus
Addresses
Database
Addresses
ControlLogix
Controller Tags
Server
Driver
Status
Status
from Module
Register
Data
storage
Register
Data
Processor Memory
MNetR Module
Backplane Interface
Configuration
Status
4
2
3
5
1
1 The server driver receives the configuration information from the
configuration file on the Compact Flash Disk, and the module initializes the
servers.
2 A Host device, such as a Modicon PLC or an HMI application issues a read
or write command to the module’s node address. The server driver qualifies
the message before accepting it into the module.
3 When the module accepts the command, the data is immediately transferred
to or from the internal database in the module. If the command is a read
command, the data is read out of the database and a response message is
built. If the command is a write command, the data is written directly into the
database and a response message is built. If the pass-through feature is
utilized, the write message is transferred directly to the processor and is not
written to the module’s database.
4 When the data processing has been completed in Step 3, the response is
issued to the originating master node.
5 Counters are available in the Status Block that permit the ladder logic
program to determine the level of activity of the Server Driver.
After the server socket is open, it must receive messages within a one minute
period, or else it will close the socket. After closing, the socket will be reused.
An exception to this normal mode is when the pass-through mode is
implemented. In this mode, all write requests will be passed directly to the
processor and will not be placed in the database. This permits direct, remote
control of the processor without the intermediate database. This mode is
especially useful for Master devices that do not send both states of control. For
example, a SCADA system may only send an on command to a digital control
point and never send the clear state. The SCADA system expects the local logic
to reset the control bit. Pass-through must be used to simulate this mode. The