Yaskawa iQpump Manual Supplement User Manual
Page 54
54
YASKAWA TM.iQp.10 Technical Manual Supplement
b5-07
01AB
PI Offset Adjustment
PI Offset
Sets the amount of offset of the output of the PI controller. Set as a % of
fmax.
The PI Offset Adjustment parameter has two different uses. Parameter b5-
07 serves different functions depending on whether it is used on a standard
PI loop or a Differential PI loop.
1: Parameter b5-07 causes an offset to be applied to the output of the PI
function in a non-Differential PI loop. Every time the PI output is updated,
the offset is summed with the PI output. This can be used to artificially
kick-start a slow starting PI loop.
2: If the drive is configured for Differential PI Regulation
(H3-09 = 16), then the PI Offset is the targeted maintained differential
between the signal measured on analog input A1 and the signal measured
on analog input A2.
–100.0 ~
+100.0 %
0.0 %
Programming
b5-08
01AC
PI Primary Delay Time
Constant
PI Delay Time
Sets the amount of time for a filter on the output of the PI controller.
0.00 ~
10.00 sec
0.00 sec
Programming
b5-09
01AD
PI Output Level Selection
Output Level Sel
Determines whether the PI controller will be direct or reverse acting.
0: Normal Output (direct acting)
1: Reverse Output (reverse acting)
0 ~ 1
0
Programming
b5-10
01AE
PI Output Gain Setting
Output Gain
Sets the output gain of the PI controller.
0.0 ~ 25.0
1.0
Programming
b5-12
01B0
PI Feedback Reference
Missing Detection
Selection
Fb los Det Sel
0: Disabled
1: Alarm
2: Fault
0 ~ 2
2
Programming
b5-13
01B1
PI Feedback Loss
Detection Level
Fb los Det Lvl
Sets the PI feedback loss detection level as a percentage of maximum
frequency (E1-04).
0 ~ 100 %
0 %
Programming
b5-14
01B2
PI Feedback Loss
Detection Time
Fb los Det Time
Sets the PI feedback loss detection delay time in terms of seconds.
0.0 ~
25.5 sec
2.0 sec
Programming
b5-17
01B5
PI Accel/Decel Time
Acc/Dec Time
Applies an accel/decel time to the PI setpoint reference.
0.0 ~
25.5 sec
0.0 sec
Programming
b5-32
85F
Integrator Ramp Limit
Int Ramp Lim
When set a value greater than zero, the PI Integrator is forced to be within
+/- this amount of the soft starter output
0.0 ~
10.0 Hz
0.0 Hz
Programming
Denotes that parameter can be changed when the drive is running.
Energy Saving
b8-01
01CC
Energy Saving Control
Selection
Energy Save Sel
Energy Savings function enable/disable selection
0: Disabled
1: Enabled
0 ~ 1
0
Programming
b8-04
01CF
Energy Saving Coefficient
Value
Energy Save COEF
Used to fine-tune the energy savings function.
0.0 ~ 655.0
kVA
Dependent
Programming
b8-05
01D0
Power Detection Filter
Time
kW Filter Time
0 ~
2000 ms
20 ms
Programming
b8-06
01D1
Search Operation Voltage
Limit
Search V Limit
0 ~ 100 %
0 %
Programming
Accel/Decel
C1-01
0200
Acceleration Time 1
Accel Time 1
Sets the time to accelerate from zero to maximum frequency.
0.0 ~
6000.0 sec
20.0 sec
Programming
C1-02
0201
Deceleration Time 1
Decel Time 1
Sets the time to decelerate from maximum frequency to zero.
10.0 sec
Programming
C1-03
0202
Acceleration Time 2
Accel Time 2
Sets the time to accelerate from zero to maximum frequency when selected
via a multi-function input.
10.0 sec
Programming
C1-04
0203
Deceleration Time 2
Decel Time 2
Sets the time to decelerate from maximum frequency to zero when selected
via a multi-function input.
10.0 sec
Programming
C1-05
0204
Acceleration Time 3
Accel Time 3
Sets the time to accelerate from zero to maximum frequency when
activated by P3-12. Used for system response stabilization.
50.0 sec
Programming
C1-06
0205
Deceleration Time 3
Decel Time 3
Sets the time to decelerate from maximum frequency to zero when
activated by P3-12. Used for system response stabilization.
50.0 sec
Programming
Denotes that parameter can be changed when the drive is running.
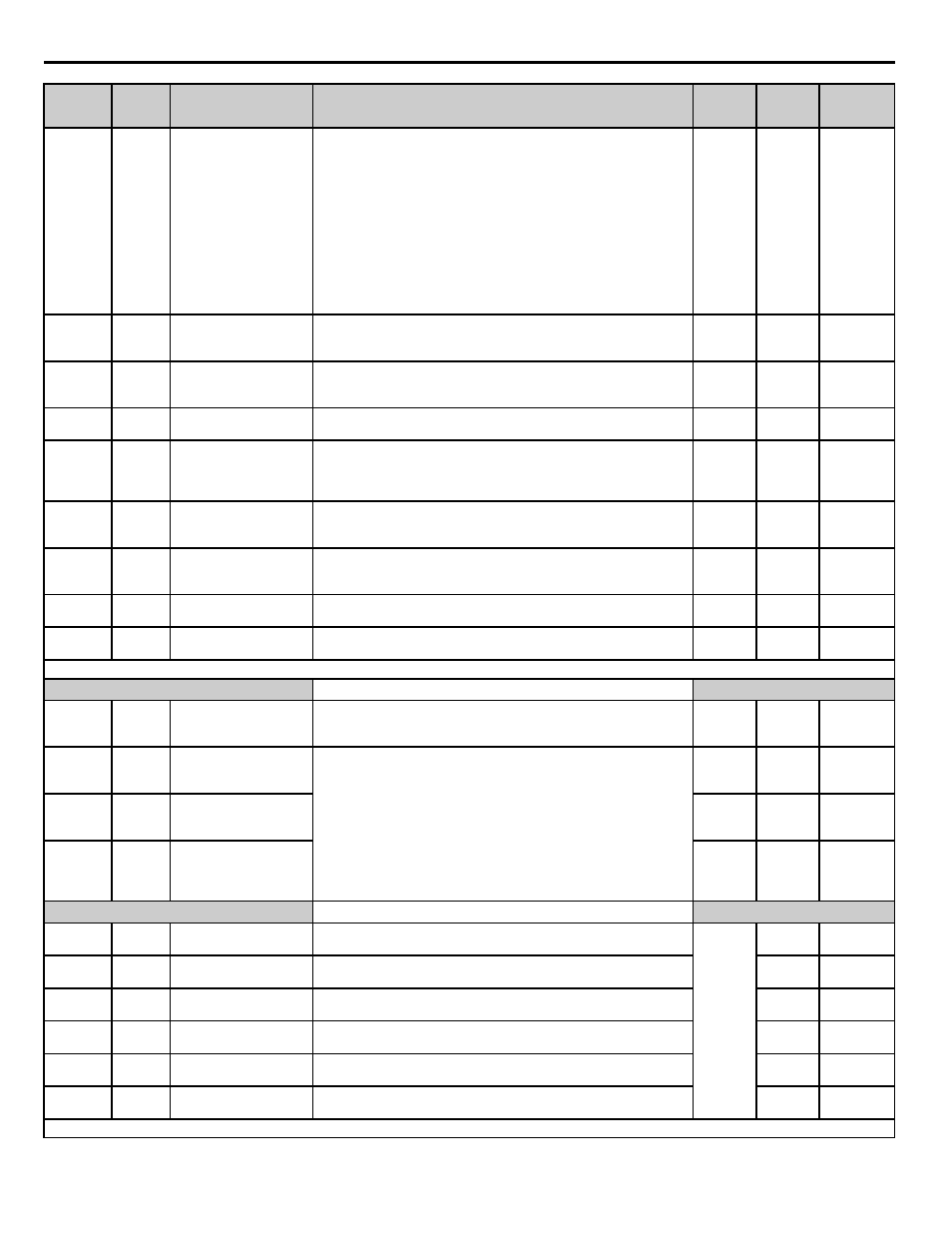
Parameter
No.
Addr.
Hex
Parameter Name
Digital Operator
Display
Description
Setting
Range
Factory
Setting
Menu
Location