Yaskawa V7 Drives User Manual
Page 113
6-3
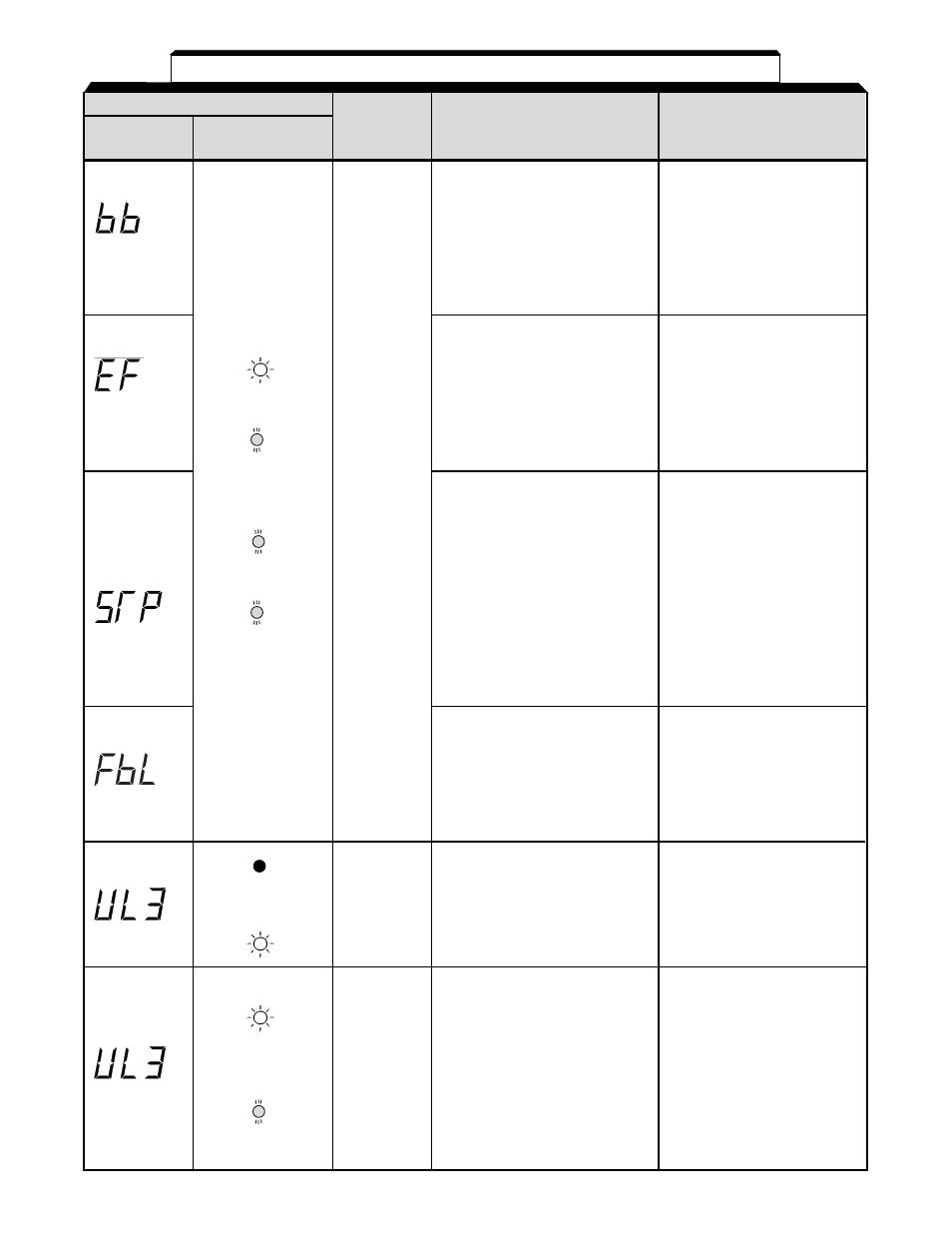
Alarm Display
Digital
RUN (Green)
Drive
Explanation
Causes and
Operator
ALARM (Red)
Status
Corrective Actions
BB (External baseblock)
Check the external circuit
Baseblock command at
(sequence).
multi-function terminal is
active, the drive output
Blinking
is shut OFF (motor coasting).
Temporary condition is
cleared when input command
is removed.
EF (Simultaneous FWD/
Check the external circuit
REV run commands)
(sequence).
When FWD and REV
run commands are
Blinking
simultaneously input
for over 500ms, the
drive stops according
Warning
to parameter n005.
only.
STP (Operator function
Open FWD/REV
Fault
stop) is pressed during
command of control
contacts
running by the control circuit
circuit terminals.
do not
terminals FWD / REV
change
command.
state.
The drive stops according
to parameter n005.
STP (Emergency stop)
Blinking
Drive receives emergency
stop alarm signal.
Check the external circuit
Drive stops according
(sequence).
to parameter n005.
FBL (PID feedback loss
Check the mechanical
detection)
system and correct the
PID feedback value drops
cause, or increase the
below the detection level.
value of n137.
Blinking
When PID feedback loss is
detected, the Drive operates
according to the n136 setting.
Protective
When under torque is
Parameter n118 up to the
operation.
detected, drive performs
lowest value allowed for
Output is
operation according to the
the machine.
shut OFF
preset setting of constant
and motor
n117.
coasts to
a stop.
Warning.
UL3 (Under torque detection)
Load (output current or
Fault
output torque) is too low.
contacts do
not change
state.
V/f mode: Drive output
current fell below the preset
value in parameter n118.
Blinking
Vector mode: Motor current
Check the driven machine
or torque fell below the
and correct the cause of
preset value in parameter
the fault, or decrease the
n097 and n118.
value of parameter n118
Table 6-1. Alarm Displays and Corrective Actions - Continued
or