I.9 parameter table – Yaskawa iQpump Micro Quick Start User Manual
Page 94
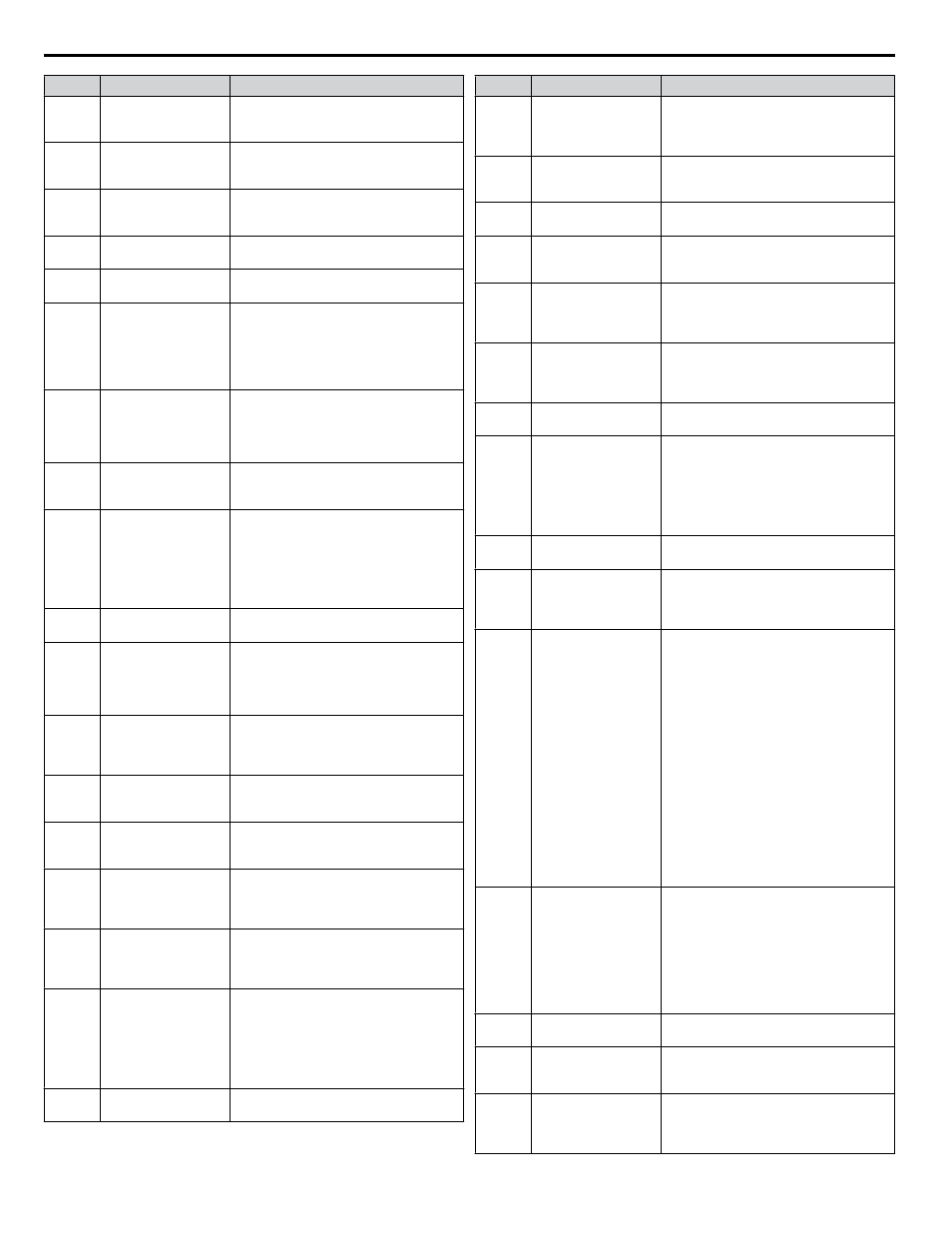
No.
Name
Description
H6-01
Pulse Train Input
Terminal RP Function
Selection
0: Frequency reference
1: PID feedback value
2: PID setpoint value
H6-02
Pulse Train Input
Scaling
Sets the terminal RP input signal frequency
that is equal to 100% of the value selected
in H6-01.
H6-03
Pulse Train Input Gain
Sets the level of the value selected in H6-01
when a frequency with the value set in
H6-02 is input.
H6-04
Pulse Train Input Bias Sets the level of the value selected in H6-01
when 0 Hz is input.
H6-05
Pulse Train Input Filter
Time
Sets the pulse train input filter time
constant.
H6-06
Pulse Train Monitor
Terminal MP Selection
Select the pulse train monitor output
function (value of the o-oo part of
Uo-oo).
Example: Select “501” for monitor U5-01.
Select “0” when not using this parameter or
when using in the through mode.
H6-07
Pulse Train Monitor
Scaling
Sets the terminal MP output signal
frequency when the monitor value is 100%.
For example, to have the pulse train monitor
output equal the output frequency, set
H6-06 to 102 and H6-07 to 0.
H6-08
Pulse Train Input
Minimum Frequency
Sets the minimum frequency for the pulse
train input to be detected. Enabled when
H6-01 = 0, 1, or 2.
L1-01
Motor Overload
Protection Selection
0: Disabled
1: General purpose motor (standard fan
cooled)
2: Drive dedicated motor with a speed range
of 1:10
3: Vector motor with a speed range of 1:100
6: General purpose motor (50 Hz)
L1-02
Motor Overload
Protection Time
Sets the motor thermal overload protection
(oL1) time.
L1-03
Motor Overheat Alarm
Operation Selection
(PTC input)
0: Ramp to stop
1: Coast to stop
2: Fast Stop (decelerate to stop using the
deceleration time in C1-09)
3: Alarm only (“oH3” will flash)
L1-04
Motor Overheat Fault
Operation Selection
(PTC input)
0: Ramp to stop
1: Coast to stop
2: Fast Stop (decelerate to stop using the
deceleration time in C1-09)
L1-05
Motor Temperature
Input Filter Time (PTC
input)
Adjusts the filter for the motor temperature
analog input (H3-02 or H3-10 = E).
L1-13
Continuous
Electrothermal
Operation Selection
0: Disabled
1: Enabled
2: Enabled (RTC)
L1-22
Leakage Current Filter
Time Constant 1
Sets the time constant for reducing the
sensitivity level when detecting leakage
current. Set in seconds and used when
operating at constant speed.
L1-23
Leakage Current Filter
Time Constant 2
Sets the time constant for reducing the
sensitivity level when detecting leakage
current. Set in seconds and used during
acceleration and deceleration operation.
L2-01
Momentary Power
Loss Operation
Selection
0: Disabled. Drive trips on Uv1 fault when
power is lost.
1: Recover within the time set in L2-02. Uv1
will be detected if power loss is longer than
L2-02.
2: Recover as long as CPU has power.
Uv1 is not detected.
L2-02
Momentary Power
Loss Ride-Thru Time
Sets the Power Loss Ride-Thru time.
Enabled only when L2-01 = 1 or 3.
No.
Name
Description
L2-03
Momentary Power
Loss Minimum
Baseblock Time
Sets the minimum wait time for residual
motor voltage decay before the drive output
reenergizes after performing Power Loss
Ride-Thru.
L2-04
Momentary Power
Loss Voltage Recovery
Ramp Time
Sets the time for the output voltage to return
to the preset V/f pattern during Speed
Search.
L2-05
Undervoltage
Detection Level (Uv1) Sets the DC bus undervoltage trip level.
L2-06
KEB Deceleration
Time
Sets the time required to decelerate from the
speed when KEB was activated to zero
speed.
L2-07
KEB Acceleration
Time
Sets the time to accelerate to the frequency
reference when momentary power loss is
over. If set to 0.0, the active acceleration
time is used.
L2-08
Frequency Gain at
KEB Start
Sets the percentage of output frequency
reduction at the beginning of deceleration
when the KEB Ride-Thru function is
started.
L2-11
DC Bus Voltage
Setpoint during KEB
Sets the desired value of the DC bus voltage
during KEB Ride-Thru.
L3-01
Stall Prevention
Selection during
Acceleration
0: Disabled.
1: General purpose. Acceleration is
paused as long as the current is above the
L3-02 setting.
2: Intelligent. Accelerate in the shortest
possible time without exceeding the L3-02
level.
L3-02
Stall Prevention Level
during Acceleration
Used when L3-01 = 1 or 2. 100% is equal
to the drive rated current.
L3-03
Stall Prevention Limit
during Acceleration
Sets Stall Prevention lower limit during
acceleration when operating in the constant
power range. Set as a percentage of drive
rated current.
L3-04
Stall Prevention
Selection during
Deceleration
0: Disabled. Deceleration at the active
deceleration rate. An ov fault may occur.
1: General purpose. Deceleration is paused
when the DC bus voltage exceeds the Stall
Prevention level.
2: Intelligent. Decelerate as fast as possible
while avoiding ov faults.
3: Stall Prevention with braking resistor.
Stall Prevention during deceleration is
enabled in coordination with dynamic
braking.
4: Overexcitation Deceleration.
Decelerates while increasing the motor
flux.
7: Overexcitation Deceleration 3. Applies
more braking power than normal
overexcitation deceleration. Yaskawa
recommends extra caution due to the heavy
load on the motor.
L3-05
Stall Prevention
Selection during Run
0: Disabled. Drive runs at a set
frequency. A heavy load may cause speed
loss.
1: Decel time 1. Uses the deceleration time
set to C1-02 while Stall Prevention is
performed.
2: Decel time 2. Uses the deceleration time
set to C1-04 while Stall Prevention is
performed.
L3-06
Stall Prevention Level
during Run
Enabled when L3-05 is set to 1 or 2. 100%
is equal to the drive rated current.
L3-11
Overvoltage
Suppression Function
Selection
0: Disabled
1: Enabled
L3-17
Target DC Bus Voltage
for Overvoltage
Suppression and Stall
Prevention
Sets the desired value for the DC bus
voltage during overvoltage suppression and
Stall Prevention during deceleration.
i.9 Parameter Table
94
YASKAWA TOEP YAIQPM 02B YASKAWA AC Drive - iQpump Micro Quick Start Guide