Yaskawa CACR-SRxxBF User Manual
Page 18
2.1 Ratings and Specifications
2-3
2
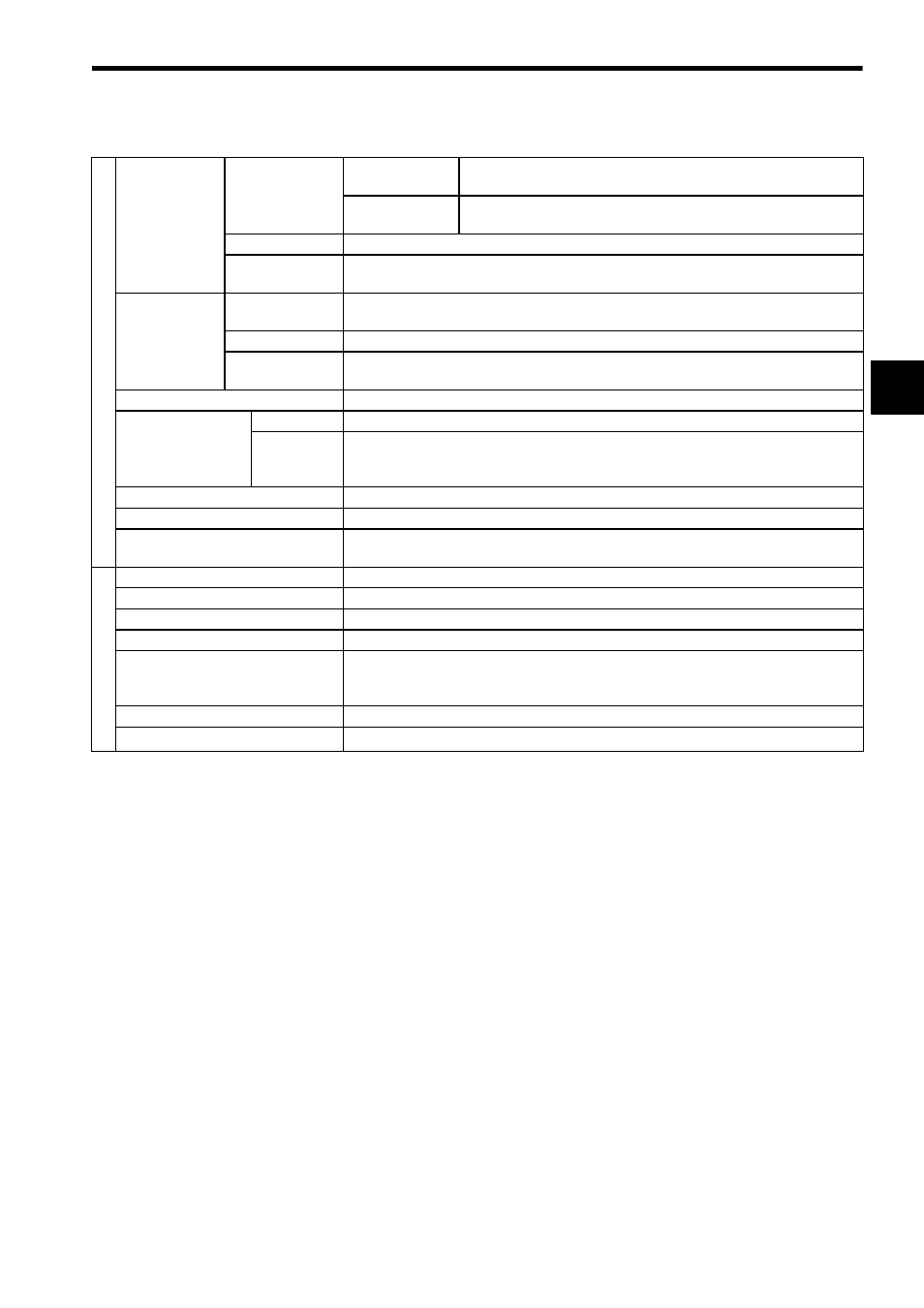
I/O Signals
Speed/Torque
References
Rated Refer-
ence Voltage
Speed control
mode
±6 VDC (forward rotation with positive reference) at rated speed
Torque control
mode
±3 VDC (forward rotation with positive reference) at rated torque
Input Impedance
About 30 k
Ω
Circuit Time
Constant
About 70
µs
Auxiliary Inputs
Rated Refer-
ence Voltage
±2 V to ±10 VDC (forward rotation with positive reference) at rated speed.
Input Impedance
About 30 k
Ω
Circuit Time
Constant
About 70
µs
Built-in Reference Power Supply
±12 VDC±5 %, ±30 mA
Position Output
(PG pulses)
Form
Line-driver or open-collector (phase A, phase B, phase C)
Frequency
Dividing
Ratio
Any setting ratio
Sequence Input
Servo ON, P control, forward run prohibited, reverse run prohibited, and alarm reset
Sequence Output
Servo alarm, servo ready, TG ON, current limit, and alarm code (3-bit output)
External Current Limits
±0 V to ±9 VDC, forward rotation: -3 VDC/rated current, reverse rotation: 3 VDC/rated
current
Buil
t-in
Functio
ns
Dynamic Brake (DB)
Operated at main power OFF, servo alarm, servo OFF.
Regenerative Processing
Built-in
Allowable Load Moment of Inertia
5 times of rotor moment of inertia
Overtravel Prevention
Operated at P-OT and N-OT
Protection
Overcurrent, regeneration error, overvoltage, input overvoltage, overspeed, insufficient
voltage, overload, zero-point pulse error, A/D error, overrun detection, open-phase, and
CPU error
LED Display
7-segment LED (status and alarm display)
Monitor
Speed monitor 1000 r/min
-1
and torque monitor 3V/rated torque
(cont’d)