Yaskawa 1000 Series Drive Option - CANopen Technical Manual User Manual
Page 21
8 Object Dictionary
YASKAWA ELECTRIC SIEP C730600 45B 1000-Series Option SI-S3 Technical Manual
21
■
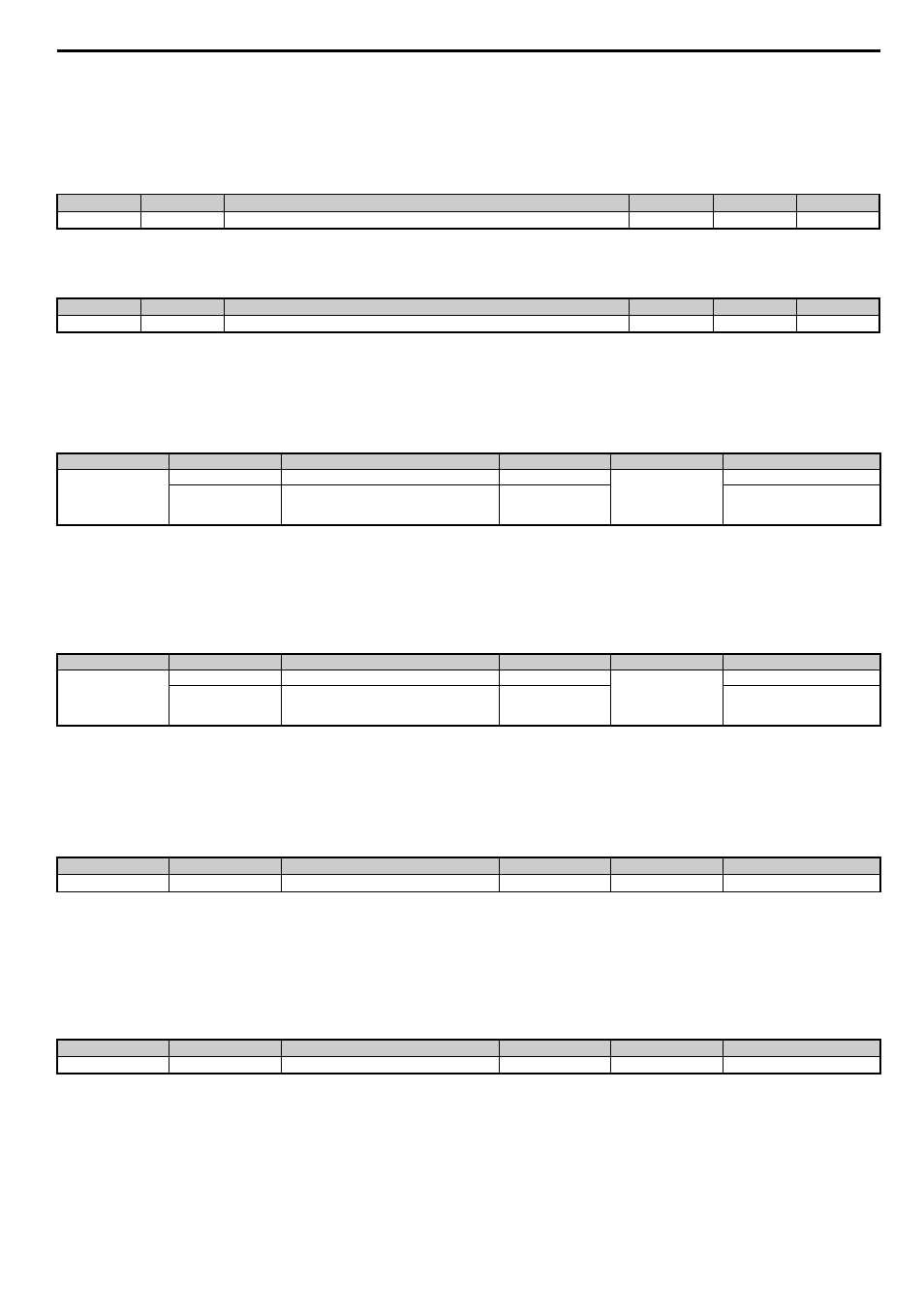
2020 (Hex) - Torque Reference/Torque Limit
This object sets the torque reference or the torque limit in units of 0.1%.
To use this object, set drive parameter F6-06 to 1. The value will be used as the torque reference for torque control (d5-01 = 1) or as the torque limit
in speed control (d5-01 = 0).
Note: The availability of the torque control and torque limit function depends on the drive and the selected control mode. For details, refer to the technical manual for the
drive.
■
2030 (Hex) - Torque Compensation
This object sets the torque compensation in units of 0.1%.
■
2040 (Hex) - MEMOBUS/Modbus Read Request
This object can be used to read out the content of drive MEMOBUS/Modbus registers. The address of the MEMOBUS/Modbus must be written in
byte 3 and 4 of Subindex 1, bytes 1 and 2 have to be set to 0. After sending a MEMOBUS/Modbus Read Request to the drive, the MEMOBUS/
Modbus register content can be read out from object 2140H.
For more details on MEMOBUS/Modbus address and data, refer to the MEMOBUS/Modbus Data Table in Appendix C of the technical manual for
the drive.
■
2050 (Hex) - MEMOBUS/Modbus Write Request
Using this object, drive MEMOBUS/Modbus registers can be written. The data must be written in byte 1 and 2 of Subindex 1, and the MEMOBUS/
Modbus address must be written in bytes 3 and 4. After sending a MEMOBUS/Modbus Write Request to the drive, the response can be read from
object 2150H.
For more details on MEMOBUS/Modbus address and data, refer to the MEMOBUS/Modbus Data Table in Appendix C of the technical manual for
the drive.
■
2060 (Hex) - MEMOBUS/Modbus Unlimited ENTER Command
Depending on the drive parameter H5-11 setting, an ENTER command must be used to activate drive parameters changed via MEMOBUS/Modbus
Write Commands. The unlimited ENTER command activates parameters in the drive RAM only. If the drive power is cycled, parameter changes are
lost. If more than one parameter has been changed, it is enough to send only one ENTER command after the last parameter change. Doing so will
activate all changed parameters. This ENTER command can be used without limitations.
To execute this type of ENTER command, "save" (73H + 61H + 76H + 65H) must be written in object 2060H, subindex 0.
■
2070 (Hex) - MEMOBUS/Modbus Limited ENTER Command
Depending on the drive parameter H5-11 setting, an ENTER command must be used to activate drive parameters changed via MEMOBUS/Modbus
Write Commands. The limited ENTER command activates parameters in the drive’s RAM and saves them to the EEPROM. When power supply
loss occurs or the power supply is cycled, the drive will operate using the saved parameters. If more than one parameter has been changed, it is
enough to send only one ENTER command after the last parameter change. Doing so will activate all changed parameters. This type of ENTER
command can be applied approximately 100,000 times, and should be used only when necessary.
To execute this type of ENTER command, "save" (73H + 61H + 76H + 65H) must be written in object 2070H, subindex 0.
Index (Hex)
Subindex
Content
Access
PDO Mapping
Data Length
2020
0
Torque Reference / Torque Limit
Read / Write
Possible
2 byte
Index (Hex)
Subindex
Content
Access
PDO Mapping
Data Length
2030
0
Torque Compensation
Read / Write
Possible
2 byte
Index (Hex)
Subindex
Content
Access
PDO Mapping
Data Length
2040
0
Number of entries
Read Only
Possible
1 byte
1
MEMOBUS/Modbus read request
Read / Write
2 + 2 byte
0000H + MEMOBUS/Modbus
Address
Index (Hex.)
Subindex
Content
Access
PDO Mapping
Data Length
2050
0
Number of entries
Read Only
Possible
1 byte
1
MEMOBUS/Modbus Write request
Read / Write
2 + 2 byte
MEMOBUS/Modbus
Data + Address
Index (Hex)
Subindex
Content
Access
PDO Mapping
Data Length
2060
0
Unlimited ENTER command
Read / Write
Possible
4 byte
Index (Hex)
Subindex
Content
Access
PDO Mapping
Data Length
2070
0
Limited enter command
Read / Write
Possible
4 byte