Metrohm 815 Robotic Soliprep User Manual
Page 133
■■■■■■■■■■■■■■■■■■■■■■
4 Robotic Filtration Soliprep 2.815.3110
815 Robotic Soliprep
■■■■■■■■
125
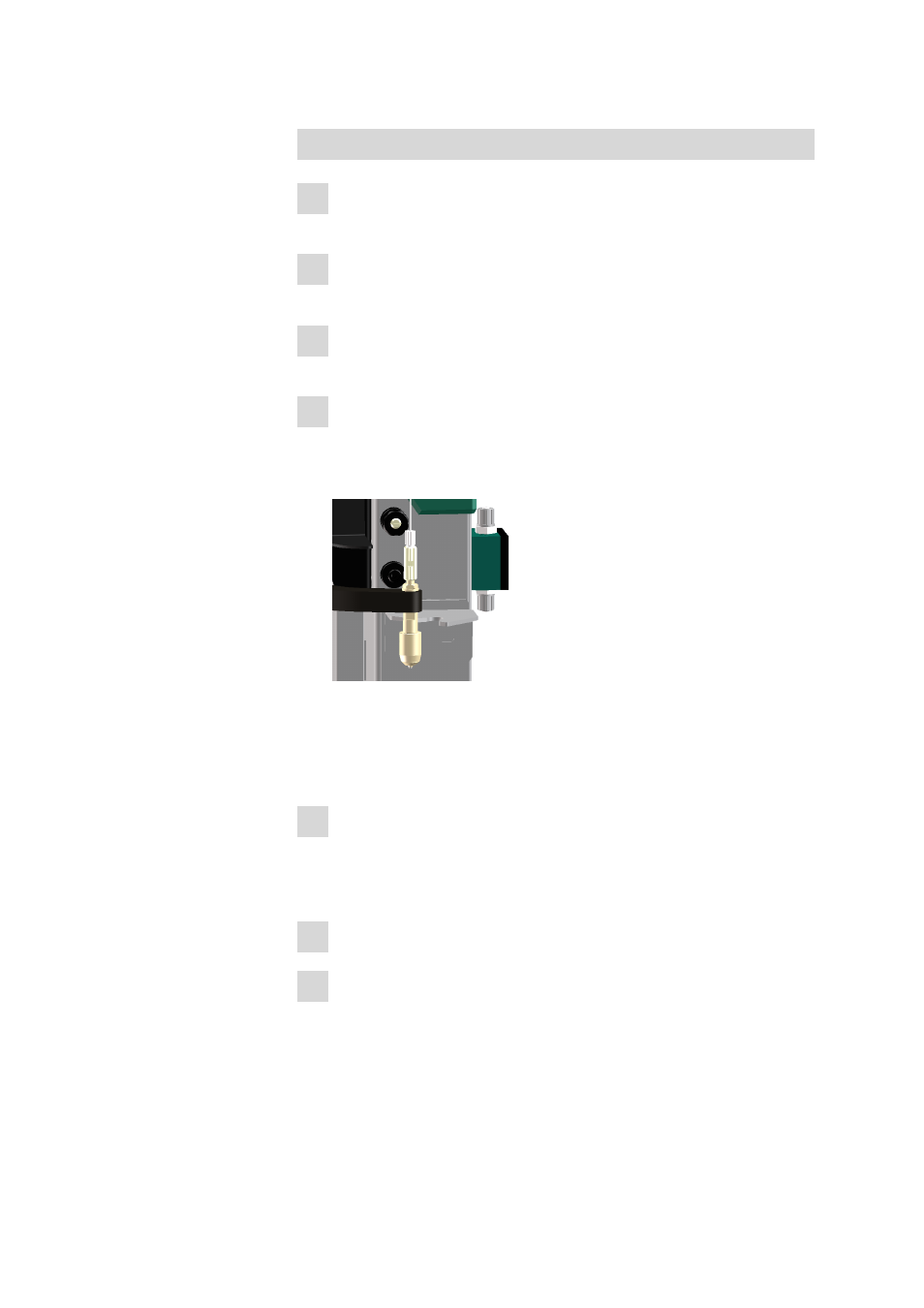
Lift positions for stripping needles and filters
1 In the manual control in the left-hand window, click on the Tower 1
item under 815_1 (815 Robotic …) and then select the Move tab.
2 Fasten a syringe needle or a membrane filter to the Luer adapter of
the transfer robotic arm.
3 Under Robotic arm position, select the Target position = Exter-
nal 1 and click on [Start].
4 Move the lift downward until the thick sleeve of the Luer adapter is
approx. 1 cm underneath the deflector. Under Lift position, click on
the arrow key [Arrow down] and also (if required) [Arrow up] in
order to set a suitable position.
The Luer adapter must be positioned at a distance of approx. 2 cm
from the deflector. Its thick sleeve must be positioned approx. 1 cm
beneath the deflector in order for the adapter to move into the
opening of the deflector.
5 To correct the position of the Luer adapter, correct the lift position
with the arrow keys [Arrow down] and [Arrow up] first. Then cor-
rect the position of the robotic arm using the arrow keys [Arrow
left] and [Arrow right].
6 Switch to the Assign position tab.
7 Select the Work position for = External 1 in the Lift position
field.