Kinetix 3 (200v-class) drives with tl, Bulletin tl motor cable combinations – Rockwell Automation 2071-APx Kinetix 3 Drive Systems Design Guide User Manual
Page 14
14
Rockwell Automation Publication GMC-RM005B-EN-P - September 2013
Kinetix 3 Drive Systems
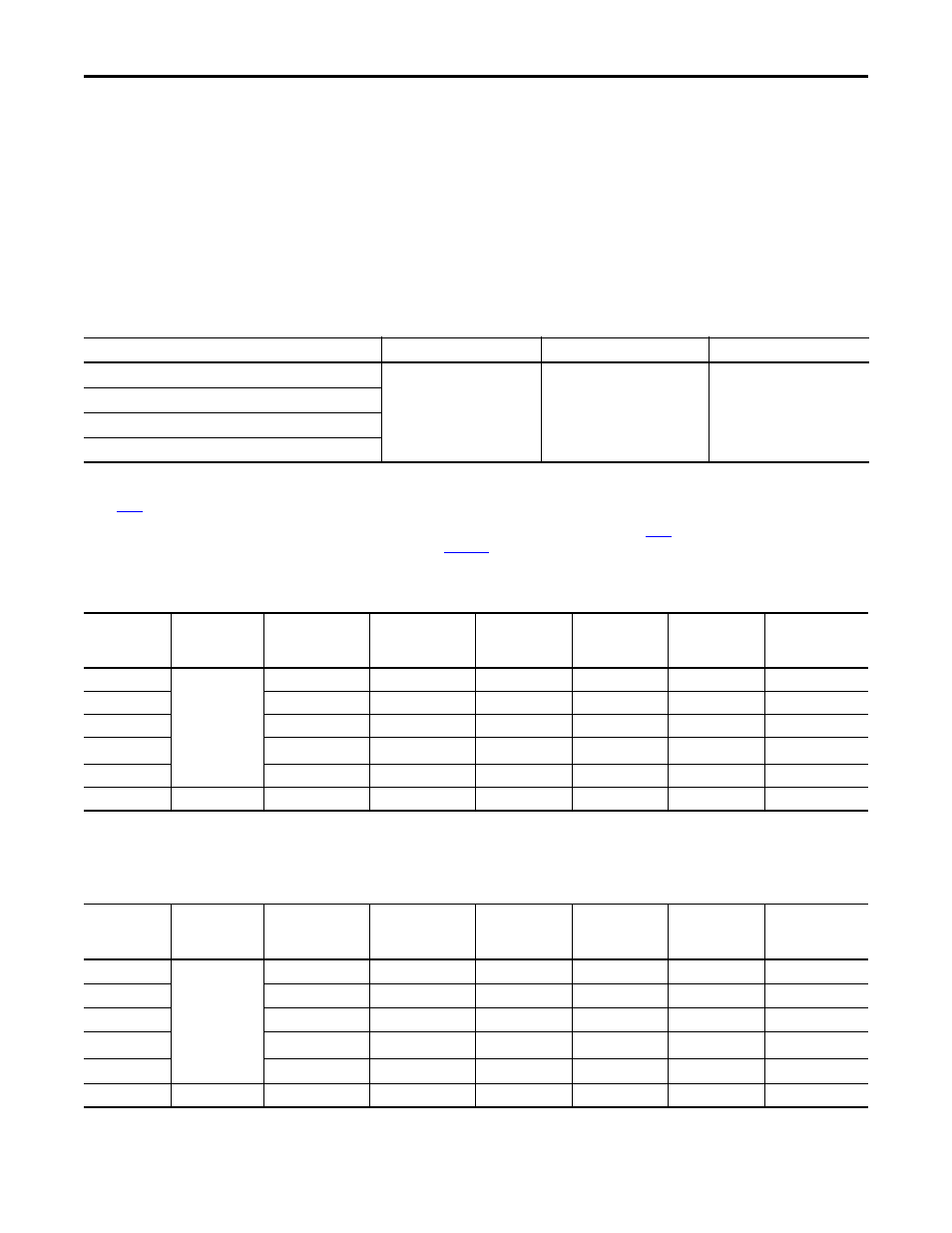
Kinetix 3 (200V-class) Drives with TL-Series (Bulletin TL) Low Inertia Motors
This section provides system combination information for the Kinetix 3 servo drives when matched with TL-Series
(Bulletin TL) low-inertia motors. Bulletin TL-A
xxx motors are equipped with absolute high-resolution encoder feedback
and are characterized as having 300 mm (11.8 in.) cable extensions with rectangular connectors. Included in this section are
motor power, feedback, and brake cable catalog numbers, system performance specifications, and the optimum torque/
speed curves.
Bulletin TL Motor Cable Combinations
For cable configuration illustrations and feature descriptions, by catalog number, refer to 2090-Series Motor/Actuator Cables Overview beginning on
.
Cable length xx is in meters. Refer to the Kinetix Motion Accessories Technical Data, publica
, for standard cable lengths.
Bulletin TL (non-brake) Performance Specifications with Kinetix 3 (200V-class) Drives
Performance specification data and curves reflect nominal system performance of a typical system with motor at 40 °C (104 °F) and drive at 50 °C (122 °F) ambient and rated line voltage. For additional
information on ambient and line conditions, refer to Motion Analyzer software.
Bulletin TL (brake) Performance Specifications with Kinetix 3 (200V-class) Drives
Performance specification data and curves reflect nominal system performance of a typical system with motor at 40 °C (104 °F) and drive at 50 °C (122 °F) ambient and rated line voltage. For additional
information on ambient and line conditions, refer to Motion Analyzer software.
Motor Cat. No.
Motor Power Cable
Motor Feedback Cable
(1)
(1) TL-Series (Bulletin TL) rotary motors require the 2071-TBMF breakout board with 3.6V lithium battery (not included) for multi-turn high-resolution encoder operation or when using an overtravel limit
switch. To meet this requirement, remove the drive-end connector and wire the 2090-DANFCT-Sxx cable to the 2071-TBMF breakout board. Refer to Kinetix 3 Motor Feedback Example (Bulletin TL motors)
on
for more information.
Motor Brake Cable
TL-A120P, TL-A130P
2090-DANPT-16Sxx
2090-DANFCT-Sxx
Absolute High-resolution
2090-DANBT-18Sxx
TL-A220P, TL-A230P
TL-A2540P
TL-A410M
Rotary Motor
Speed, max
rpm
System Continuous
Stall Current
A 0-pk
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
System Peak
Torque
N•m (lb•in)
Motor Rated
Output
kW
Kinetix 3
200V-class Drives
TL-A120P
5000
1.03
0.181 (1.60)
2.50
0.36 (3.20)
0.086
2071-AP1
TL-A130P
1.85
0.325 (2.88)
4.90
0.76 (6.70)
0.14
2071-AP1
TL-A220P
3.50
0.836 (7.40)
7.90
1.48 (13.1)
0.35
2071-AP4
TL-A230P
5.50
1.30 (11.5)
15.5
3.05 (27.0)
0.44
2071-AP4
TL-A2540P
10.0 2.94
(26.0)
24.8 7.10
(63.0)
0.86 2071-AP8
TL-A410M
4500
15.5 5.42
(48.0)
43.4
13.0
(115.0)
2.0
2071-A15
Rotary Motor
Speed, max
rpm
System Continuous
Stall Current
A 0-pk
System Continuous
Stall Torque
N•m (lb•in)
System Peak
Stall Current
A 0-pk
System Peak
Torque
N•m (lb•in)
Motor Rated
Output
kW
Kinetix 3
200V-class Drives
TL-A120P
5000
0.93
0.163 (1.44)
2.50
0.36 (3.20)
0.077
2071-AP1
TL-A130P
1.67
0.293 (2.59)
4.90
0.76 (6.70)
0.13
2071-AP1
TL-A220P
3.15
0.757 (6.70)
7.90
1.48 (13.10)
0.24
2071-AP4
TL-A230P
4.95
1.160 (10.30)
15.5
3.05 (27.0)
0.32
2071-AP4
TL-A2540P
10.0
2.940 (26.00)
24.8
7.10 (63.0)
0.66
2071-AP8
TL-A410M
4500
14.0
4.860 (43.0)
43.4
13.0 (115.0)
1.80
2071-A15