Rockwell Automation 1441-DYN25-MBAL Balancing Extension Module for the Dynamix 2500 User Manual
Page 25
Rockwell Automation Publication 1441-UM004A-EN-P - May 2011
25
Balancing Extension Module Chapter 2
Plane (x)
Sets the plane for which the settings below apply.
Two plane get two sets of the following attributes/parameters
(settings)
1
2
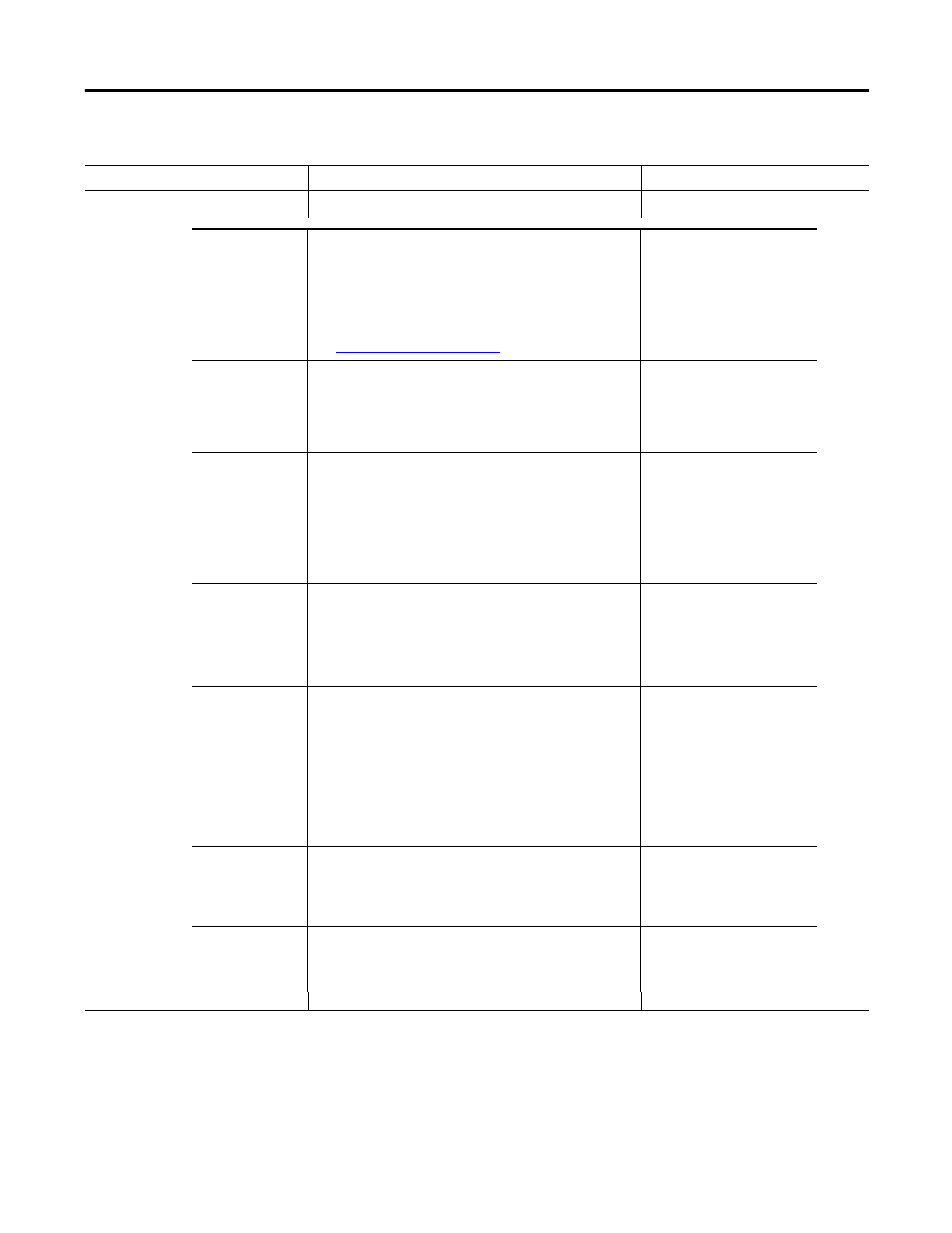
Table 2 - Balance Extension Module Parameters
Parameter Description
Value
Input Chan
The input channel required for the measurement.
Select channel X for single-plane balancing, with the
transducer connected to the data collector’s Connection A.
For two-plane balancing with two transducers, you set one
plane’s transducer as channel X, the other plane’s transducer as
channel Y.
Two Plane Balancing on page 45
for more information.
X (default) on connector A only
Y, on Connector B
Coupling
The type of coupling to be applied to the measurement.
• AC, Acquires the input signal from a buffered output
(external) device. Power is not applied to the transducer.
• ICP, Applies DC to the charge amplified transducer signal
and couples the dynamic signal to the input channel.
AC
ICP
(default)
Sensitivity
The sensitivity of the transducer. Sensitivity is set as mV/EU,
where EU is the base engineering unit of the transducer.
Use the keypad to enter the transducer sensitivity in millivolts
(mv) per Engineering Unit (EU). 100 mV/EU is used for most
acceleration transducers, 200 mV/EU for most non-contact
displacement transducers, and 1000 mV/EU if the input is volts
and the scales is to be read directly. The default setting is 100
mV/EU.
0.010 to 1000 mV/EU
A 100 m V/G accelerometer
would be set as 100 m V/EU
Input Range
Select the signal input range between Autorange and a fixed
range in transducer units in a 1 - 2 - 5 sequence. The available
fixed values vary depending on the transducer type being used.
If a fixed range is selected and the data collector detects an
over range, it automatically selects the next higher range until
it does not over range.
Autoranging
Type
Select the appropriate weight position type,
For a rotor without vanes or blades, set Type to Continuous.
Continuous specifies that weights may be placed at any
placement position on the balance plane.
Fixed is known also as vector splitting. It works with Number of
Positions and Position 1 Offset fields. Fixed specifies that
weights may be placed only at designated positions, for
example, rotors having a specific weight hole pattern, or with a
specific number of fan blades.
Continuous (default)
Fixed
No. of posns
Applies to Fixed weight position measurements only.
The first position defaults to 0
°
, subsequent positions evenly
spaced.The number of positions refers to the number of rotor
components, such as blades on a fan.
3 to 360
°
Enter 0 (zero) for a rotor without
vanes or blades.
Posn 1 Offset
Applies to Fixed weight position measurements only.
Enter the fixed position 1 offset, from zero to 360
°
, relative to
the trigger reference.
0 to 360
°