Motor driver truth table – Pololu Orangutan SVP User Manual
Page 32
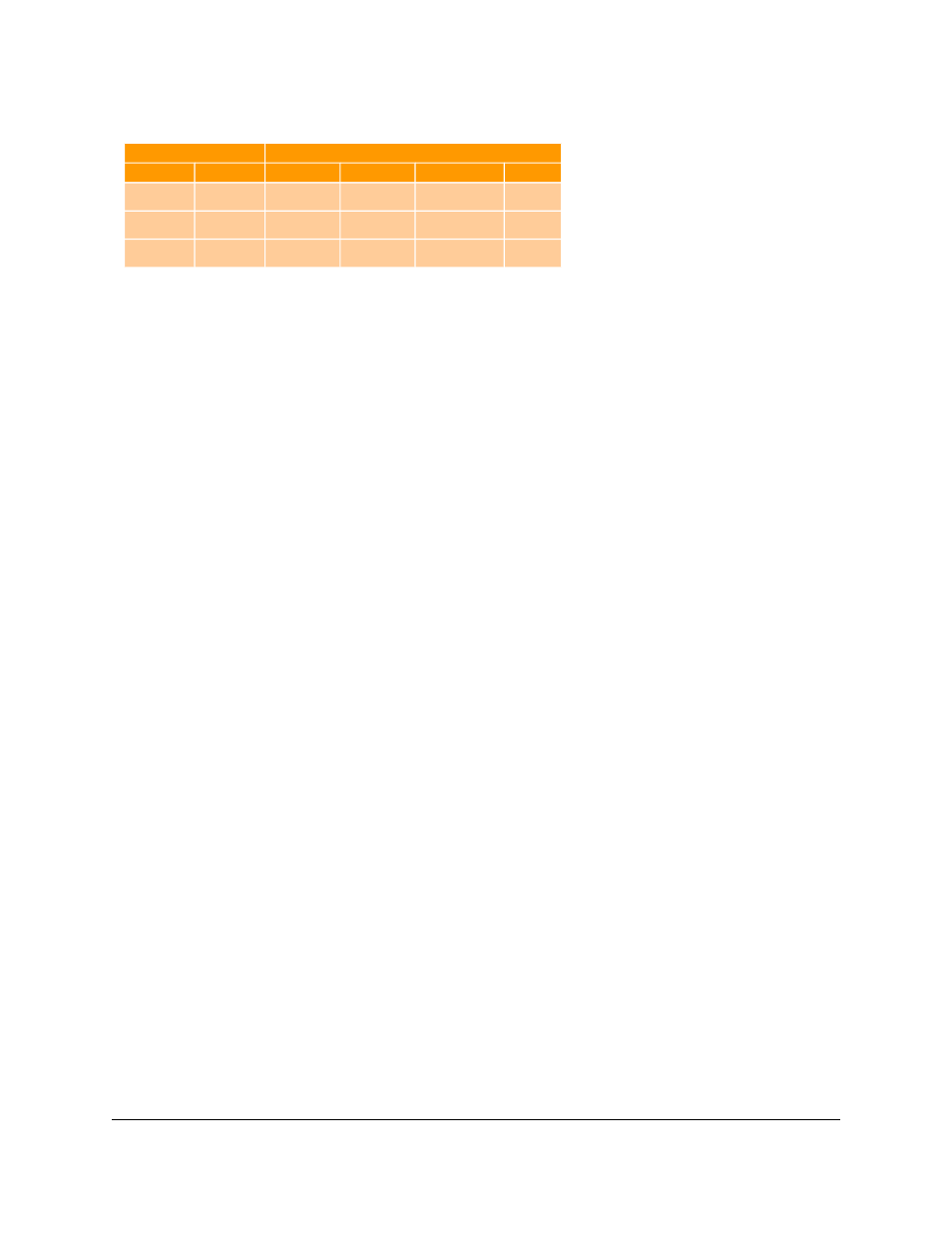
10. Motor Driver Truth Table
Input
Orangutan SVP output
PD7, PD6 PC7, PC6 M1A, M2A M1B, M2B motor effect LED on
H
H
L
H
“forward”*
green
H
L
H
L
“reverse”*
red
L
H or L
L
L
brake low
none
* Note that the concept of “forward” is arbitrary as simply flipping the motor leads results in rotation in the
opposite direction.
Motor 1 is controlled by pins PD7 (i.e. OC2A) and PC7. Motor 2 is controlled by pins PD6 (i.e. OC2B) and PC6.
Pins PD6 and PD7 are connected to the AVR’s eight-bit hardware PWM outputs, which allows you to achieve
variable motor speeds through hardware timers rather than software. This frees the CPU to perform other tasks
while motor speed is automatically maintained by the AVR timer hardware.
You can control the Orangutan SVP’s motors using the functions in the
section of the Pololu AVR C/C++ Library, or you can write your own code.
Pololu Orangutan SVP User's Guide
© 2001–2012 Pololu Corporation
10. Motor Driver Truth Table
Page 32 of 37