MTS WIFT Mini Transducer Interface User Manual
Page 50
SWIFT
®
Mini TI
50
Edit the Calibration File
Transducer Interface Setup
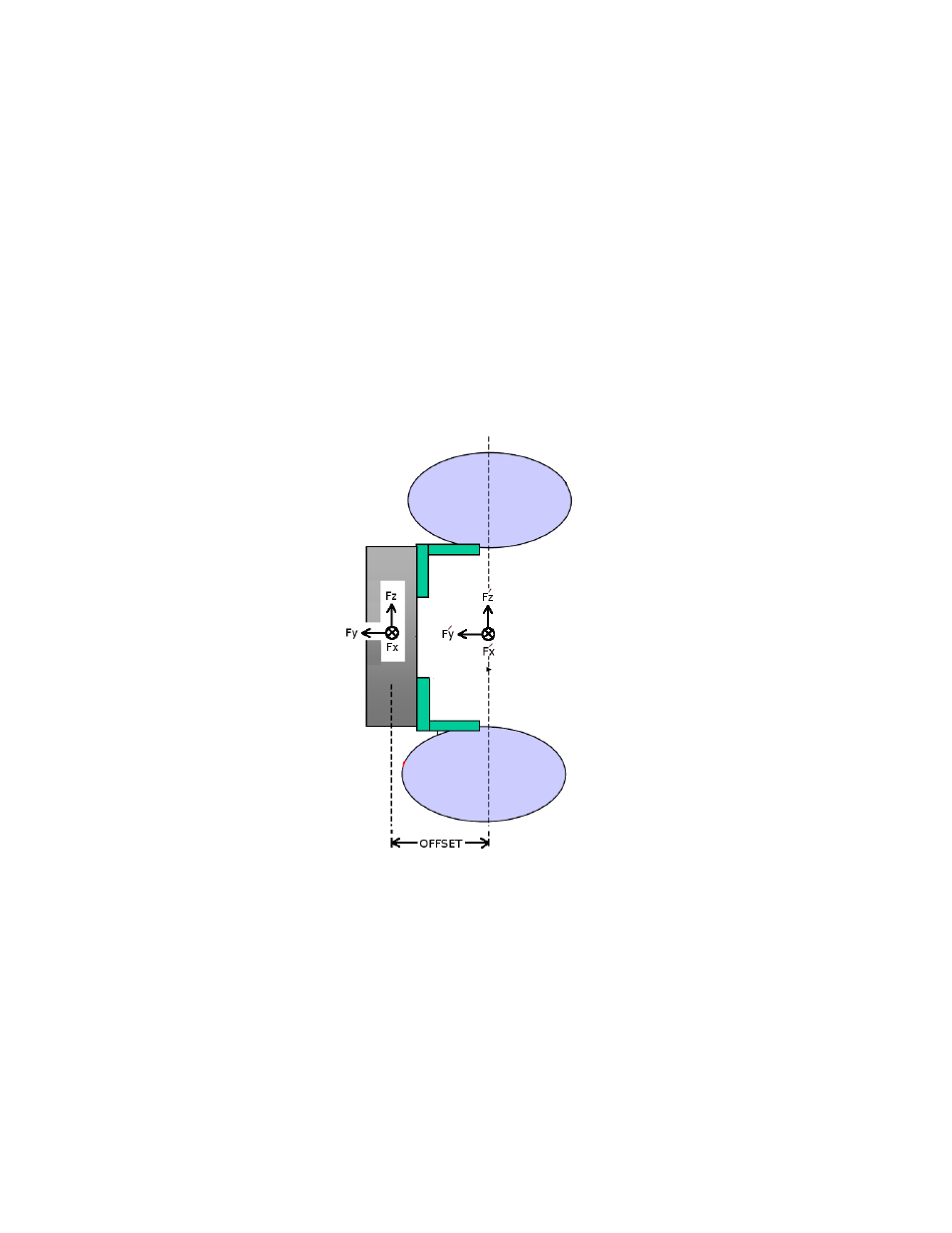
3. If desired, set up the coordinate system offset.
In the following figure, Fx, Fy, Fz is the original default coordinate system
location. F’x, F’y, F’z is the output coordinate system with a y-axis negative
offset. The offset is entered in the calibration file:
// Coordinate system offset in mm.
// A non-zero value will shift the location of the output
// coordinate system along the transducer's y-axis. A
// positive value will shift the coordinate system from
// the center of the transducer body in the positive
// y-axis direction by the amount specified.
YAxisOffset = [user entered offset]
If the offset in this example is 100mm, the calibration file parameter would
be entered as:
YAxisOffset = -100.0
4. Perform this step for spinning application. For non-spinning applications,
skip to Step
A.
Verify the value for AngleMode.
Set the AngleMode=0
In this mode, the encoder pulses are summed in with the offset. At the
end of the process the value in the TI internal memory and is used to
perform the rotational transformation of the output signals.