Coordinate system, Coordinate system 19 – MTS WIFT Mini Transducer Interface User Manual
Page 19
Coordinate System
SWIFT
®
Mini TI
Hardware Overview
19
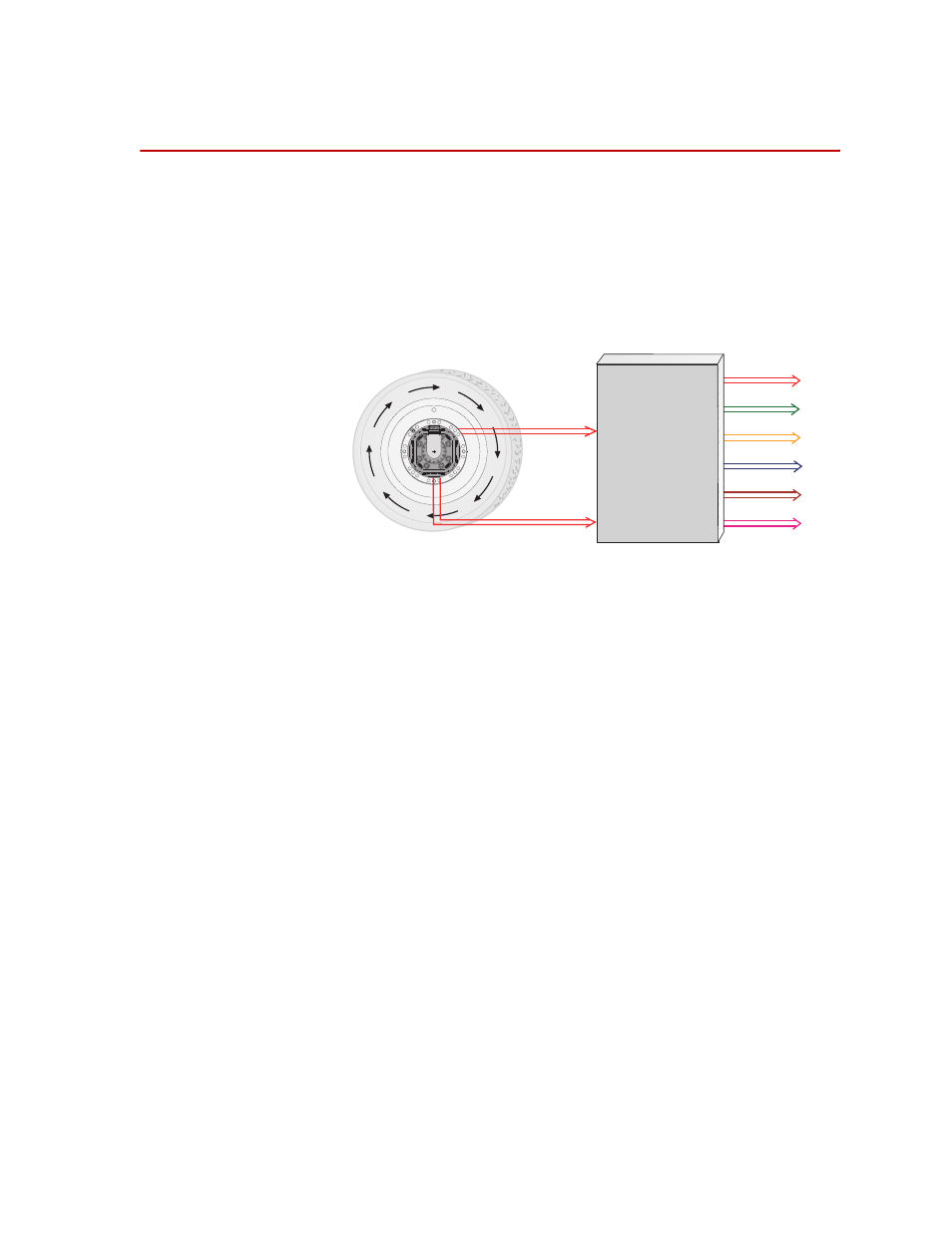
Coordinate System
In the transducer, independent strain gage bridges measure forces and moments
about three orthogonal axes. The signals are amplified to improve the signal-to-
noise ratio. An encoder signal measures angular position, which is used to
convert raw force and moment data from the rotating transducer to a vehicle-
based coordinate system. The force, moment, and encoder information are sent to
the transducer interface (TI).
The TI performs cross talk compensation and converts the rotating force and
moment data to a vehicle coordinate system. The result is six forces and moments
that are measured at the spindle: Fx, Fy, Fz, Mx, My, and Mz. If desired, the TI
can convert the forces and moments to represent a measurement that is offset
from the spindle along the y-axis. A seventh (angular) output is available for tire
uniformity information, angular position, or to determine wheel speed
(depending on the data acquisition configuration).
Normally, the moments are referenced to the center of the transducer but can be
offset to another location such as the center of the rim or tire patch.
Fx
Fy
Fz
Mz
Mx
My
Transducer
Interface
Output signals
±10 Volts
Angular
Position
Bridge
Outputs
S10-10