2 number of increments and zero pulse offset – Lenze E94AYFLF Digital frequency module User Manual
Page 24
Digital frequency extension module | Parameter setting & configuration
Digital frequency output
Parameter setting
24
L
EDS94AYFLF EN 3.2 - 10/2010
3.2.2
Number of increments and zero pulse offset
The number of increments set in
/
defines e.g. the number of increment to
be output before a zero pulse is created.
Each zero pulse defines a covered "revolution" of the rotary transducer simulated by the
digital frequency output.
Within such a "revolution" (in the value range 0 ... 65535 increments) the zero pulse can
be shifted by setting a zero pulse offset in
/
.
A connection between absolute position and "revolution" is defined by setting the position,
as described in the following chapter "
". The position of a zero pulse within
a "revolution" remains unchanged.
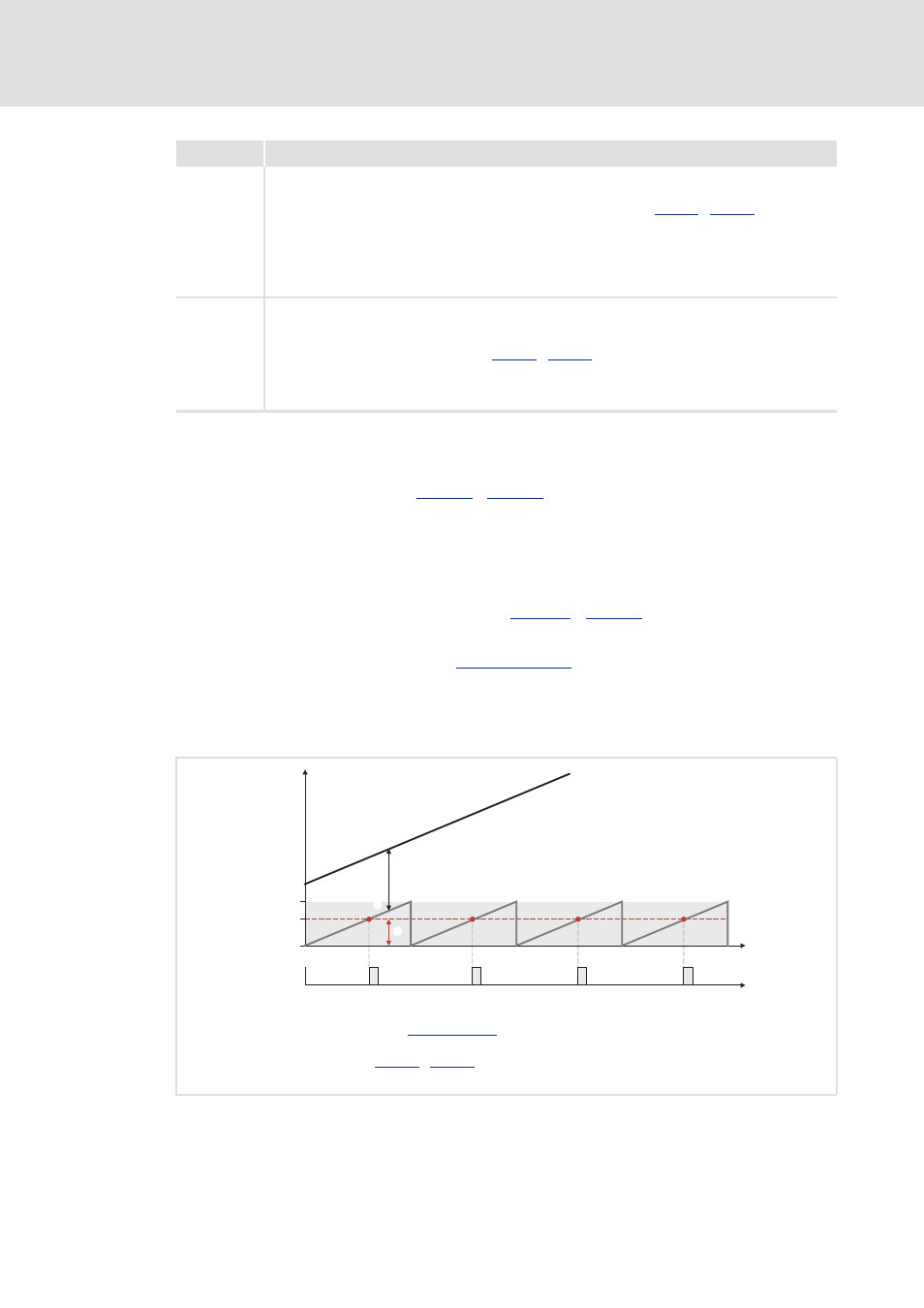
Example - signal characteristic:
[3-2]
Example: Signal characteristic with the zero pulse offset set to 39321 increments
6
Output of the encoder angle
• The angle of rotation in [increments] derived from the encoder input is output as a frequency
signal after being evaluated with the set number of increments (
• The output signal is integrated to a position value via a counter and made available to the
application via the output DFOUT_dnActualPos_p of the system block
LS_DigitalFrequencyOutput.
• It is irrelevant for the output whether the encoder input is used as a load encoder, motor encoder,
or not used at all for the motor control.
7
Output of a speed signal of the application
• The speed signal in [rpm] defined via the input DFOUT_dnSpeedSet_s of the system block
LS_DigitalFrequencyOutput is integrated and output as a frequency signal after being evaluated
with the set number of increments (
• The output signal is integrated to a position value via a counter and made available to the
application via the output DFOUT_dnActualPos_p of the system block
LS_DigitalFrequencyOutput.
Selection
Info
n
Absolute position (DFOUT_dnActualPos_p, also takes into account each overflow of the encoder position)
o
Position difference (is determined by
)
p
Encoder position (in the value range 0 ... 65535 increments)
q
Zero pulse offset (adjustable in
r
Zero pulses
39321
65535
t
t
[Inc]
0
DFOUT_dnActualPos_p