5 pulse output e3, 6 anti-creep for the pulse outputs, 7 design examples – Cirrus Logic CS5461A User Manual
Page 18: Figure 6. stepper motor format on e1, Cs5461a, 5 pulse output
CS5461A
18
DS661F3
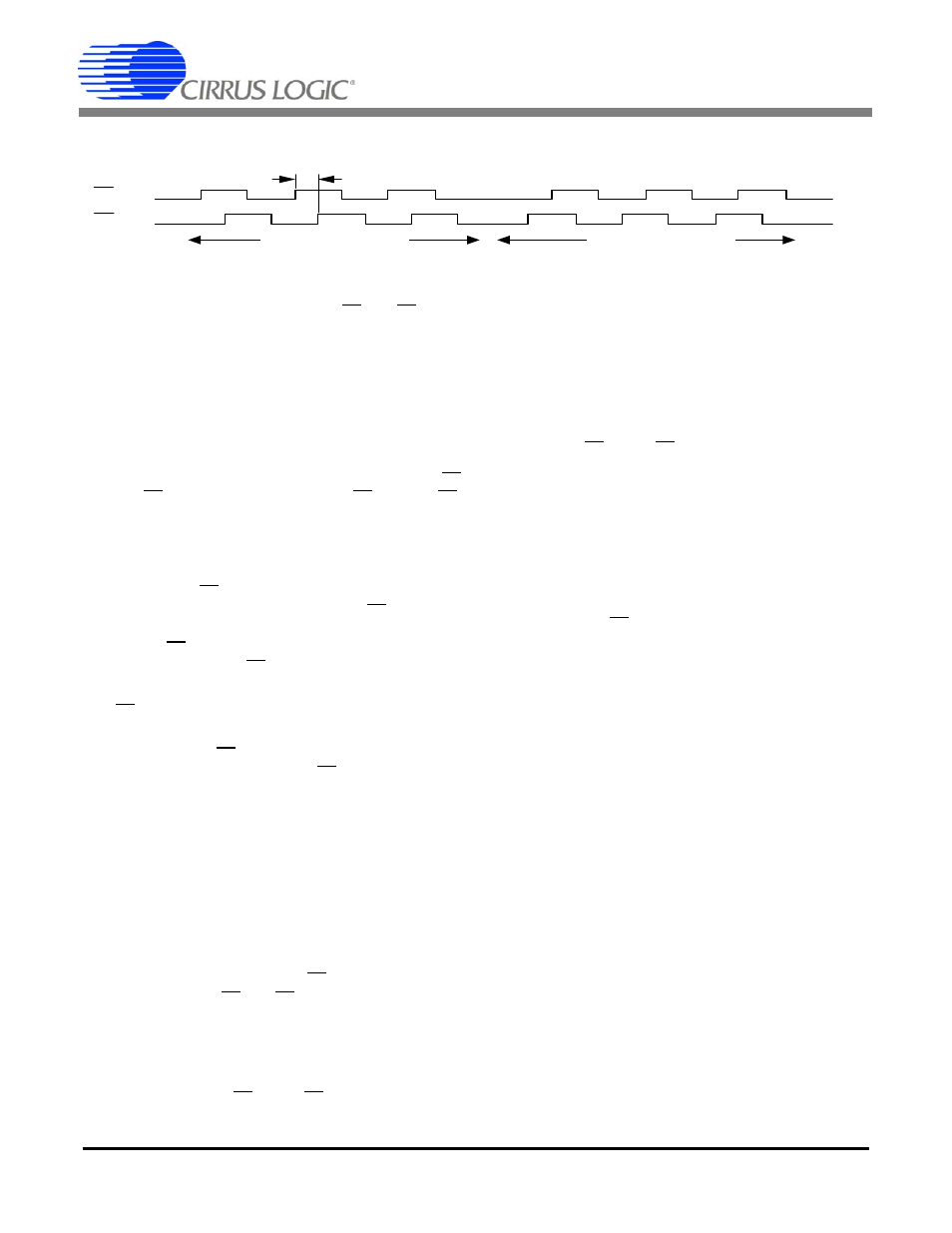
energy level, the energy output pins (E1 and E2) alter-
nate changing states (see Figure 6). The duration
(t
edge
) between the alternating states is defined by the
transfer function:
The direction the motor will rotate is determined by the
order of the state changes. When energy is positive, E1
will lead E2. When energy is negative, E2 will lead E1.
The Pulse Width Register (PW) does not affect the step-
per motor format.
5.4.5
Pulse Output
E3
The pulse output E3 is designed to assist with meter cal-
ibration. The pulse-output frequency of E3 is directly
proportional to the active power calculated from the in-
put signals. E3 pulse frequency is derived using a sim-
ular transfer function as E1, but is set by the value in the
PulseRateE
3
Register.
The E3 pin outputs negative and positive energy, but
has no energy direction indicator.
The pulse width of E3 is configurable. The PulseWidth
register defines the pulse width of E3 in units of 1/OWR
or:
The default value is 0.
5.4.6 Anti-creep for the Pulse Outputs
Anti-creep allows the measurement element to maintain
an energy level, such that when the magnitude of the
accumulated active power is below this level, no energy
pulses are output. Anti-creep is enabled by setting bit
FAC in the Control Register for E3 and bit EAC in the
Control Register for E1 and E2.
For low-frequency pulse output formats (i.e. mechanical
counter and stepper motor formats), the active power is
accumulated over time. When a designated energy lev-
el is reached (determined by the transfer function) a
pulse is generated on E1 and/or E2. If active power with
alternating polarity occurs during the accumulation peri-
od (e.g. random noise at zero power levels), the accura-
cy of the registered energy will be maintained.
For high-frequency pulse output formats (i.e. normal
and alternate pulse formats), the active power is accu-
mulated over time until a
8x buffer is defined. Then,
when the designated energy level is reached, a pulse is
generated on E1 and/or E2. For pulse outputs with high
frequencies and power levels close to zero, the extend-
ed buffer prevents random noise from being registered
as active energy.
5.4.7 Design Examples
EXAMPLE #1:
The maximum rated levels for a power line meter are
250 V rms and 20 A rms. The required number of puls-
es per second on E1 is 100 pulses per second (100 Hz),
when the levels on the power line are 220 V rms and
15 A rms.
With a 10x gain on the voltage and current channel the
maximum input signal is 250 mV
P
(see
on page 15). To prevent over-driving the
channel inputs, the maximum rated rms input levels will
register 0.6 in V
RMS
and I
RMS
by design. Therefore the
voltage level at the channel inputs will be 150 mV rms
when the maximum rated levels on the power lines are
250 V rms and 20 A rms.
Solving for PulseRateE
1,2
using the transfer function:
Therefore with PF = 1 and
the PulseRateE
1,2
Register is set to:
E 1
E 2
P o s it iv e E n e r g y
N e g a t iv e E n e r g y
. . .
. . .
. . .
. . .
t
e d g e
Figure 6. Stepper Motor Format on E1 and E2
t
edge
sec
1
FREQ
E
----------------------
=
t
pw
PulseWidth
MCLK
K
1024
---------------------------------------------
=
PulseRateE
1 2
,
FREQ
E
VREFIN
2
VIN
VGAIN
IIN
PF
-------------------------------------------------------------------
=
VIN
220V
150mV
250V
132mV
=
=
IIN
15A
150mV
20A
112.5mV
=
=
PulseRateE
100
2.5
2
0.132
10
0.1125
10
-----------------------------------------------------------------
420.8754Hz
=
=